Litar yang membolehkan motor yang disambungkan beroperasi mengikut arah jam dan berlawanan arah jarum jam melalui pencetus input alternatif dipanggil litar pengawal dua arah.
Reka bentuk pertama di bawah membincangkan litar pengawal motor Bidirectional berasaskan jambatan penuh atau jambatan H menggunakan 4 opamps dari IC LM324. Dalam artikel kedua kita belajar mengenai litar pengawal motor dua arah tork tinggi menggunakan IC 556
Pengenalan
Secara amnya, suis mekanikal terbiasa menyesuaikan arah putaran motor DC. Menyelaraskan kekutuban voltan yang digunakan dan motor memutar arah yang berlawanan!
Di satu pihak, ini mungkin mempunyai kekurangan yang perlu ditambahkan suis DPDT untuk mengubah polaritas voltan, tetapi kita hanya menangani suis yang menjadikan prosedurnya agak mudah.
Walau bagaimanapun DPDT mungkin mempunyai satu masalah serius, tidak disarankan agar anda secara tiba-tiba membalikkan voltan pada motor DC semasa gerakan putarannya. Ini boleh menyebabkan lonjakan semasa, yang mungkin dapat mematikan pengawal kelajuan yang berkaitan.
Tambahan pula, sebarang tekanan mekanikal boleh menimbulkan masalah yang serupa. Litar ini mengatasi komplikasi ini dengan mudah. Arah dan kelajuan dimanipulasi dengan bantuan potensiometer bersendirian. Memusingkan periuk ke arah yang ditentukan menyebabkan motor mula berputar.
Menukar periuk ke arah yang bertentangan membolehkan motor berputar dalam gerakan terbalik. Kedudukan tengah di periuk mematikan motor, memastikan motor perlahan terlebih dahulu dan kemudian berhenti sebelum usaha untuk mengubah arah dibuat.
Spesifikasi teknikal
Voltan: Litar dan motor menggunakan bekalan kuasa biasa. Ini menunjukkan bahawa kerana voltan kerja tertinggi LM324 adakah 32VDC ini juga menjadi voltan maksimum yang dapat diakses untuk mengendalikan motor.
Semasa: IRFZ44 MOSFET direka untuk 49A, IRF4905 akan dapat mengendalikan 74A. Walaupun begitu, trek PCB yang berjalan dari pin MOSFET ke blok terminal skru dapat menguruskan sekitar 5A. Ini dapat diperbaiki dengan menyolder kepingan kawat tembaga di trek PCB.
Sekiranya demikian, pastikan MOSFET tidak menjadi terlalu panas - jika ia berlaku, maka heatsink yang lebih besar diperlukan untuk dipasang pada peranti ini.
Lout LM324

PENGENDALIAN BIDANG DARI MOTOR DC MENGGUNAKAN LM324
Pada asasnya, anda akan menemui 3 cara untuk sesuaikan kelajuan motor DC :
1. Dengan menggunakan gear mekanikal untuk mencapai pecutan ideal: Pendekatan ini sering kali melebihi kemudahan majoriti peminat berlatih di bengkel rumah.
dua. Menurunkan voltan motor melalui perintang siri. Ini pasti tidak cekap (daya akan hilang dalam perintang) dan juga mengakibatkan pengurangan tork.
Arus yang dimakan oleh motor juga meningkat ketika beban pada motor meningkat. Arus yang meningkat bermaksud penurunan voltan yang lebih tinggi pada perintang siri dan oleh itu voltan yang dijatuhkan untuk motor.
Motor kemudian berusaha menarik jumlah arus yang lebih tinggi, menyebabkan motor terhenti.
3. Dengan menggunakan keseluruhan voltan bekalan ke motor dalam denyutan pendek: Kaedah ini menghilangkan kesan penurunan seri. Ini disebut sebagai modulasi lebar nadi (PWM) dan merupakan strategi yang terdapat dalam rangkaian ini. Denyutan pantas membolehkan motor beroperasi perlahan-lahan denyutan lanjutan membolehkan motor berjalan lebih pantas.

BAGAIMANA FUNGSINYA (rujuk skema)
Litar boleh dibahagikan dalam empat peringkat:
1. Kawalan motor - IC1: A
2. Penjana gelombang segitiga - IC1: B
3. Pembanding voltan - IC1: C dan D
4. Pemacu motor - Q3-6
Mari kita mulakan dengan tahap pemandu motor, yang berpusat di sekitar MOSFET Q3-6. Hanya beberapa MOSFET ini yang kekal dalam keadaan diaktifkan pada bila-bila masa. Semasa Q3 dan Q6 adalah arus aktif melalui motor dan menyebabkannya berputar dalam satu arah.
Sebaik sahaja Q4 dan Q5 berada dalam keadaan operasi peredaran arus terbalik dan motor mula berputar ke arah yang bertentangan. IC1: C dan IC1: D menangani MOSFET mana yang dihidupkan.
Opamps IC1: C dan IC1: D berwayar sebagai pembanding voltan. Voltan rujukan untuk opamps ini dihasilkan oleh pembahagi voltan perintang R6, R7 dan R8.
Perhatikan bahawa voltan rujukan untuk IC1: D terpasang ke input '+' tetapi untuk IC1: C ia digabungkan dengan input '-'.
Ini bermaksud IC1: D diaktifkan dengan voltan lebih tinggi daripada rujukannya sedangkan IC1: C diminta dengan voltan lebih rendah daripada rujukannya. Opamp IC1: B dikonfigurasi sebagai penjana gelombang segitiga dan membekalkan isyarat pengaktifan kepada pembanding voltan yang berkaitan.
Kekerapannya kira-kira kebalikan dari pemalar masa R5 dan C1 - 270Hz untuk nilai yang digunakan.
Menurunkan R5 atau C1 meningkatkan frekuensi meningkatkan salah satu daripada ini akan mengurangkan frekuensi. Tahap output puncak ke puncak gelombang segitiga jauh lebih sedikit daripada perbezaan antara dua rujukan voltan.
Oleh itu, sangat sukar bagi kedua-dua pembanding untuk diaktifkan pada masa yang sama. Jika tidak, keempat-empat MOSFET akan mula dijalankan, membawa kepada litar pintas dan merosakkan semuanya.
Bentuk gelombang segitiga disusun di sekitar voltan mengimbangi DC. Menambah atau menurunkan voltan mengimbangi mengubah kedudukan nadi gelombang segitiga dengan tepat.
Menukar gelombang segitiga ke atas membolehkan pembanding IC1: D mengaktifkan penurunannya mengakibatkan pembanding IC1: C diaktifkan. Apabila tahap voltan gelombang segitiga berada di tengah-tengah dua rujukan voltan maka tidak ada pembanding yang diinduksi. Voltan offset DC diatur oleh potensiometer P1 melalui IC1: A, yang dirancang sebagai pengikut voltan.
Ini memberikan sumber voltan impedans keluaran rendah, yang membolehkan voltan mengimbangi DC kurang rentan terhadap impak pemuatan IC1: B.
Semasa ‘pot’ dihidupkan, voltan offset DC mula berubah-ubah, naik atau turun berdasarkan arah periuk dibalik. Diod D3 memberikan perlindungan polariti terbalik untuk pengawal.
Resistor R15 dan kapasitor C2 adalah penapis lulus rendah sederhana. Ini bertujuan untuk membersihkan sebarang lonjakan voltan yang dibawa oleh MOSFET ketika menghidupkan kuasa bekalan ke motor.
Senarai Bahagian

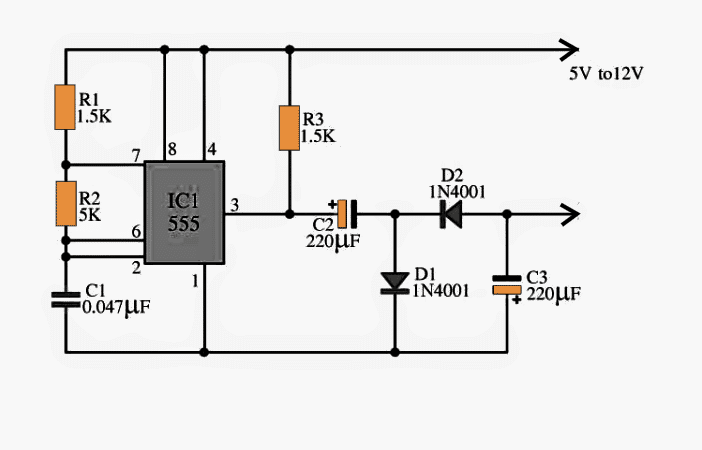
2) Kawalan Motor Bidirectional menggunakan IC 556
Kelajuan dan kawalan dua arah untuk motor DC agak mudah dilaksanakan. Untuk motor bertenaga bebas, kecepatannya, pada prinsipnya, adalah fungsi linear Motor voltan bekalan dengan magnet kekal adalah subkategori motor bertenaga bebas, dan mereka sering digunakan dalam mainan dan model.
Dalam litar ini, voltan bekalan motor diubah melalui modulasi lebar nadi (PWM) yang memastikan kecekapan yang baik serta tork yang agak tinggi pada kelajuan motor rendah. Voltan kawalan tunggal antara 0 dan +10 V membolehkan kelajuan motor dibalikkan dan berubah dari sifar hingga maksimum pada kedua arah.
IC multivibrator Astable disiapkan sebagai pengayun 80 Hz, dan menentukan frekuensi isyarat PWM. Sumber semasa T1 mengenakan caj Ca. Voltan gigi gergaji di kapasitor ini dibandingkan dengan voltan kawalan di 1C2, yang mengeluarkan isyarat PWM untuk menyangga N1-Na atau NPN1. Pemacu motor berasaskan darlington adalah litar jambatan yang mampu memacu beban hingga 4 Amps, dengan syarat arus larian tetap di bawah 5 Amps, dan penyejukan yang mencukupi disediakan untuk transistor kuasa T1 -T. Diod D1, D5 memberikan perlindungan terhadap lonjakan induktif dari motor Switch S1 memungkinkan untuk membalikkan arah motor dengan serta-merta.

Imej Prototaip



Sebelumnya: Memahami Litar Penguat Seterusnya: Cara Menghubungkan Transistor (BJT) dan MOSFET dengan Arduino