Litar yang membolehkan pengguna mengawal linier kecepatan motor yang disambungkan dengan memutar potensiometer terpasang disebut litar pengawal kelajuan motor.
3 litar pengawal kelajuan yang mudah dibina untuk motor DC disajikan di sini, satu menggunakan MOSFET IRF540, kedua menggunakan IC 555 dan konsep ketiga dengan IC 556 yang menampilkan pemprosesan tork.
Reka Bentuk # 1: Pengawal Kelajuan Motor DC berasaskan Mosfet
Litar pengawal kelajuan motor DC yang sangat sejuk dan mudah boleh dibina dengan menggunakan satu mosfet, perintang, dan periuk, seperti yang ditunjukkan di bawah:

Menggunakan BJT Emitter Follower

Seperti yang dapat dilihat, mosfet dicoret sebagai pengikut sumber atau mod saliran biasa, untuk mengetahui lebih lanjut mengenai konfigurasi ini, anda mungkin rujuk catatan ini , yang membincangkan versi BJT, namun prinsip kerja tetap sama.
Dalam reka bentuk pengawal motor DC di atas, penyesuaian periuk membuat perbezaan potensi yang berlainan di pintu gerbang mosfet, dan pin sumber mosfet hanya mengikuti nilai perbezaan potensi ini dan menyesuaikan voltan di seluruh motor dengan sewajarnya.
Ini menyiratkan bahawa sumbernya akan selalu ketinggalan 4 atau 5V di belakang voltan pintu dan berbeza naik / turun dengan perbezaan ini, menunjukkan voltan yang berbeza antara 2V dan 7V di seluruh motor.
Apabila voltan gerbang sekitar 7V, pin sumber akan membekalkan minimum 2V ke motor menyebabkan putaran motor sangat perlahan, dan 7V akan tersedia melintasi pin sumber apabila penyesuaian periuk menghasilkan 12V penuh di seberang gerbang mosfet.
Di sini kita dapat melihat dengan jelas bahawa pin sumber mosfet nampaknya 'mengikuti' pintu gerbang dan oleh itu pengikut sumber nama.
Ini berlaku kerana perbezaan antara gerbang dan pin sumber mosfet mestilah sekitar 5V, agar mosfet dapat berjalan dengan optimum.
Bagaimanapun, konfigurasi di atas membantu menerapkan kawalan kelajuan yang lancar pada motor, dan reka bentuknya dapat dibuat dengan harga yang cukup murah.
BJT juga dapat digunakan sebagai ganti mosfet, dan sebenarnya BJT akan menghasilkan julat kawalan yang lebih tinggi sekitar 1V hingga 12V di seluruh motor.
Demo Video
https://youtu.be/W762NTuQ19gUntuk mengawal kelajuan motor secara seragam dan cekap, pengawal berasaskan PWM menjadi pilihan yang ideal, di sini kita akan mengetahui lebih lanjut mengenai rangkaian mudah untuk melaksanakan operasi ini.
Reka Bentuk # 2: PWM DC Motor Control dengan IC 555
Reka bentuk pengawal kelajuan motor sederhana menggunakan PWM dapat difahami seperti berikut:
Pada mulanya semasa litar dihidupkan, pin pemicu berada pada kedudukan rendah logik kerana kapasitor C1 tidak dicas.
Keadaan di atas memulakan kitaran ayunan, menjadikan output berubah menjadi logik tinggi.
Output yang tinggi kini memaksa kapasitor untuk dicas melalui D2.
Apabila mencapai tahap voltan yang 2/3 dari bekalan, pin # 6 yang merupakan ambang pencetus IC.
Pencetus mom # 6, pin # 3 dan pin # 7 kembali ke logik rendah.
Dengan pin # 3 rendah, C1 sekali lagi mula melepaskan melalui D1, dan apabila voltan merentasi C1 jatuh di bawah paras yang 1/3 voltan bekalan, pin # 3 dan pin # 7 kembali menjadi tinggi, menyebabkan kitaran mengikuti dan terus berulang.
Sangat menarik untuk diperhatikan bahawa, C1 mempunyai dua jalur yang ditentukan secara tersendiri untuk proses pengisian dan pengosongan melalui diod D1, D2 dan melalui lengan rintangan yang ditetapkan oleh periuk masing-masing.
Ini bermaksud jumlah rintangan yang dihadapi oleh C1 semasa pengisian dan pengosongan tetap sama tidak kira bagaimana periuk diatur, oleh itu panjang gelombang nadi keluar selalu tetap sama.
Namun, kerana masa pengisian atau waktu pengisian bergantung pada nilai rintangan yang dihadapi di jalurnya, periuk secara diam-diam menetapkan jangka masa ini sesuai dengan penyesuaiannya.
Oleh kerana jangka masa pengecasan dan pelepasan dihubungkan secara langsung dengan putaran tugas output, ia berbeza-beza sesuai dengan penyesuaian panci, memberikan bentuk kepada pulsa PWM yang bervariasi pada output.
Hasil rata-rata nisbah tanda / ruang menimbulkan output PWM yang seterusnya mengawal kelajuan DC motor.
Denyut PWM dimasukkan ke pintu gerbang mosfet yang bertindak balas dan mengawal arus motor yang disambungkan sebagai tindak balas terhadap pengaturan periuk.
Tahap arus melalui motor memutuskan kelajuannya dan dengan demikian menerapkan kesan kawalan melalui periuk.
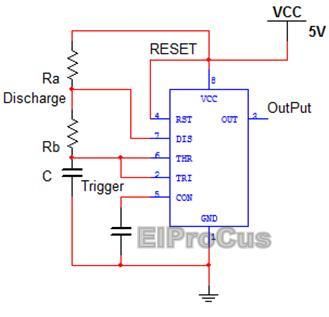
Kekerapan output dari IC dapat dikira dengan formula:
F = 1.44 (VR1 * C1)
Mosfet dapat dipilih sesuai dengan keperluan atau arus beban.
Gambarajah litar pengawal kelajuan motor DC yang dicadangkan dapat dilihat di bawah:

Prototaip:

Bukti Ujian Video:
https://youtu.be/M-F7MWcSiFYDalam klip video di atas kita dapat melihat bagaimana reka bentuk berdasarkan IC 555 digunakan untuk mengawal kelajuan motor DC. Seperti yang anda saksikan, walaupun mentol berfungsi dengan sempurna sebagai tindak balas terhadap PWM dan bervariasi intensitinya dari cahaya minimum hingga maksimum maksimum, motor tidak.
Motor pada mulanya tidak bertindak balas terhadap PWM yang sempit, sebaliknya bermula dengan sentakan setelah PWM disesuaikan dengan lebar nadi yang jauh lebih tinggi.
Ini tidak bermaksud litar mempunyai masalah, ini kerana angker motor DC dipegang antara sepasang magnet dengan erat. Untuk memulakan permulaan, angker harus melompat putarannya melintasi dua kutub magnet yang tidak dapat terjadi dengan pergerakan perlahan dan lembut. Ia mesti dimulakan dengan dorongan.
Itulah sebabnya motor pada mulanya memerlukan penyesuaian yang lebih tinggi untuk PWM dan setelah putaran dimulakan, angker memperoleh sedikit tenaga kinetik dan kini mencapai kelajuan yang lebih perlahan dapat dilaksanakan melalui PWM yang lebih sempit.
Walau bagaimanapun, mendapatkan putaran ke status perlahan yang hampir tidak dapat bergerak kerana alasan yang sama seperti yang dijelaskan di atas.
Saya berusaha sedaya upaya untuk meningkatkan tindak balas dan mencapai kawalan PWM yang paling lambat dengan membuat sedikit pengubahsuaian pada rajah pertama seperti yang ditunjukkan di bawah:

Setelah mengatakan ini, motor dapat menunjukkan kawalan yang lebih baik pada tahap yang lebih lambat jika motor dipasang atau diikat dengan beban melalui roda gigi atau sistem takal.
Ini mungkin berlaku kerana beban akan bertindak sebagai peredam dan membantu memberikan pergerakan terkawal semasa penyesuaian kelajuan lebih perlahan.
Reka Bentuk # 3: Menggunakan IC 556 untuk Kawalan Kelajuan yang Disempurnakan
Mengubah halaju motor DC nampaknya tidak begitu sukar dan anda mungkin dapati banyak litar untuknya.
Walau bagaimanapun, litar ini tidak menjamin tahap tork yang konsisten pada kelajuan motor yang lebih rendah, menjadikan fungsinya tidak efisien.
Lebih-lebih lagi pada kelajuan yang sangat rendah kerana tork tidak mencukupi, motor cenderung terhenti.
Kelemahan serius lain ialah, tidak ada ciri pembalikan motor yang disertakan dengan litar ini.
Litar yang dicadangkan bebas dari kekurangan di atas dan mampu menjana dan mengekalkan tahap tork yang tinggi walaupun pada kelajuan serendah mungkin.
Operasi Litar
Sebelum kita membincangkan litar pengawal motor PWM yang dicadangkan, kita juga ingin mempelajari alternatif yang lebih mudah yang tidak begitu cekap. Walaupun begitu, ia mungkin dianggap cukup baik selagi beban di atas motor tidak tinggi, dan selagi kelajuannya tidak dikurangkan ke tahap minimum.
Gambar menunjukkan bagaimana satu IC 556 dapat digunakan untuk mengawal kelajuan motor yang disambungkan, kami tidak akan memperincikannya, satu-satunya kelemahan konfigurasi ini ialah torknya berbanding lurus dengan kelajuan motor.
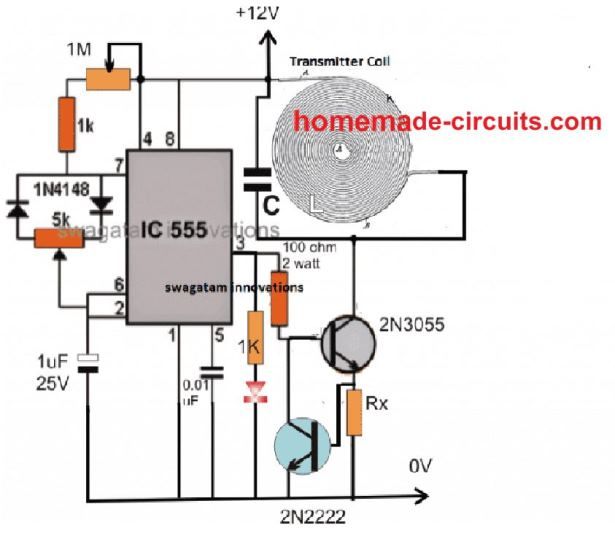
Kembali ke cadangan reka bentuk litar pengawal kelajuan tork tinggi, di sini kami telah menggunakan dua 555 IC dan bukannya satu atau lebih tepatnya satu IC 556 yang mengandungi dua 555 IC dalam satu bungkusan.
Rajah Litar

Ciri-ciri utama
Secara ringkas cadangan Pengawal motor DC merangkumi ciri-ciri menarik berikut:
Kelajuan dapat diubah terus menerus dari nol hingga maksimum, tanpa berhenti.
Tork tidak pernah dipengaruhi oleh tahap kelajuan dan tetap berterusan walaupun pada tahap kelajuan minimum.
Putaran motor boleh dipusingkan atau dipusingkan dalam sepersekian detik.
Kelajuan berubah-ubah di kedua arah putaran motor.
Kedua-dua 555 IC ditugaskan dengan dua fungsi yang berasingan. Satu bahagian dikonfigurasi sebagai multivibrator astable yang menghasilkan jam gelombang persegi 100 Hz yang dimasukkan ke bahagian 555 sebelumnya di dalam bungkusan.
Frekuensi di atas bertanggungjawab untuk menentukan frekuensi PWM.
Transistor BC 557 digunakan sebagai sumber arus tetap yang menjadikan kapasitor bersebelahan pada lengan pemungutnya diisi.
Ini mengembangkan voltan gigi gergaji melintasi kapasitor di atas, yang dibandingkan di dalam IC 556 dengan voltan sampel digunakan secara luaran berbanding pin-out yang ditunjukkan.
Voltan sampel yang berlaku secara luaran boleh diperolehi dari litar bekalan kuasa voltan berubah 0-12V sederhana.
Voltan yang berbeza ini diterapkan pada IC 556 digunakan untuk memvariasikan PWM denyutan pada output dan yang akhirnya digunakan untuk pengaturan kecepatan motor yang disambungkan.
Suis S1 digunakan untuk membalikkan arah motor dengan serta-merta bila diperlukan.
Senarai Bahagian
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 Ohm,
- R7, R8, R9, R10 = 470 Ohm,
- C1 = 0.1uF,
- C2, C3 = 0.01uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = Suis togol SPDT
Litar di atas diilhamkan dari rangkaian pemandu motor berikut yang telah lama diterbitkan di majalah elecktor elektronik India.
Mengawal Tork Motor dengan menggunakan IC 555

Gambar rajah kawalan motor pertama dapat dipermudah dengan menggunakan suis DPDT untuk operasi pembalikan motor, dan dengan menggunakan transistor pengikut pemancar untuk pelaksanaan kawalan kelajuan, seperti yang ditunjukkan di bawah:

Precision Motor Control menggunakan Single Op Amp
Kawalan yang sangat halus atau rumit dari DC. motor boleh dicapai dengan menggunakan op-amp dan generator tacho. Op-amp dipasang sebagai suis peka voltan. Di litar yang ditunjukkan di bawah ini, sebaik sahaja output dari tacho-generator lebih rendah daripada voltan rujukan yang telah ditetapkan, transistor beralih dihidupkan dan kuasa 100% akan diberikan kepada motor.
Tindakan menukar op amp akan berlaku hanya dalam beberapa milivol di sekitar voltan rujukan. Anda memerlukan bekalan kuasa berganda, yang mungkin stabil hanya zener.

Pengawal motor ini membolehkan jarak yang boleh disesuaikan tanpa melibatkan sebarang kerumitan mekanikal.
Output op amp hanya +/- 10% dari tahap rel bekalan, sehingga menggunakan pengikut pemancar ganda kelajuan motor yang besar dapat dikendalikan.
Voltan rujukan boleh diperbaiki melalui termistor, atau LDR dll. Persediaan eksperimen yang ditunjukkan dalam rajah litar menggunakan amp RCA 3047A, dan motor 0.25W 6V sebagai penjana tacho yang menghasilkan sekitar 4V pada 13000 rpm untuk maklum balas yang dimaksudkan.
Sebelumnya: 3 Litar Pencuri Joule Terbaik Seterusnya: Litar Kaunter Wisel Tekanan