Dalam catatan ini kita akan membina litar redup lampu jalan automatik Arduino, yang dapat mengurangkan kecerahannya apabila tidak ada kenderaan yang melintas di jalan untuk menjimatkan tenaga.
Oleh
Gambaran keseluruhan
Kami akan meneroka metodologi penginderaan kenderaan atau manusia tanpa pengesanan palsu yang mungkin berlaku disebabkan oleh haiwan dan juga protokol untuk meredupkan cahaya tanpa membuang tenaga.
Lampu jalan membantu kenderaan untuk memandu di sepanjang jalan, tetapi pada waktu larut malam, kebanyakan jalan akan kosong dan masih semua lampu jalan menyala hingga pagi.
Oleh kerana pencahayaan lampu jalan sepanjang malam walaupun jalan kosong, tidak ada salahnya menyalakan lampu jalan dan kos kerana penggunaan tenaga secara langsung memberi kesan kepada kerajaan tempatan.
Untuk mengatasi masalah ini dengan cara yang bijak, kita dapat mengurangkan kecerahan lampu jalan ke tahap keinginan dan hanya menyala dengan kecerahan penuh ketika kenderaan atau manusia melintas.
Ini dapat membantu pemerintah untuk mengurangkan perbelanjaan tenaga dan juga menjimatkan banyak tenaga yang dapat digunakan untuk tujuan menuntut tenaga yang lain.
Idea yang dicadangkan untuk mengesan aktiviti di jalan raya, menggunakan sensor ultrasonik yang dapat mengukur jarak antara sensor dan halangan, dalam hal ini halangannya adalah kenderaan atau manusia.
Apabila kenderaan masuk ke jarak sensor, ia melakukan beberapa pengiraan matematik untuk menentukan jarak antara kenderaan dan sensor, jika kenderaan tersebut disahkan berada di bawah jarak yang ditentukan sebelumnya, mikrokontroler on-board akan menyalakan lampu jalan di kecerahan maksimum.
Lampu jalan akan menyala pada kecerahan maksimum untuk jangka masa yang telah ditentukan dan mengurangkan kecerahannya jika tidak ada kenderaan atau manusia yang dikesan lebih jauh.
Sekarang objektif projek ini sudah dapat dicapai. Mari selami litar penyediaan yang dicadangkan.
Operasi Litar

Litar redup lampu jalan automatik terdiri daripada Arduino yang merupakan otak projek, sensor ultrasonik untuk mengesan kenderaan atau manusia. Pengatur 9V disediakan untuk menghidupkan papan mikrokontroler arduino dan MOSFET untuk menggerakkan LED yang menggunakan sedikit ampere pada kecerahan puncak.
Modul LED dan bekalan kuasa untuk penyediaan mesti dipilih dengan berhati-hati sehingga akan ada daya yang mencukupi untuk keseluruhan litar dan tidak membebani bekalan kuasa.
Modul LED boleh menjadi buatan sendiri yang ditunjukkan dalam skema atau mungkin dibeli untuk pasaran, tetapi sebelum membina atau mendapatkan satu bentuk pasaran pastikan untuk mengira keperluan voltan dan arus untuk bekalan kuasa.
Bekalan kuasa boleh menjadi SMPS atau dibina menggunakan pengubah, penerus dan pengatur voltan.
LED mengurangkan kecerahannya dengan menggunakan PWM. PWM adalah gelombang persegi, ia menghidupkan dan mematikan bekalan ke LED dengan cepat dengan lebar on dan off yang ditentukan dengan baik dalam satu kitaran. Lebar masa hidup dan mati menentukan kecerahan LED.
Apabila lampu jalan beralih ke kecerahan penuh, bekalan ke LED tidak akan mempunyai denyutan dan DC yang stabil akan dibekalkan.
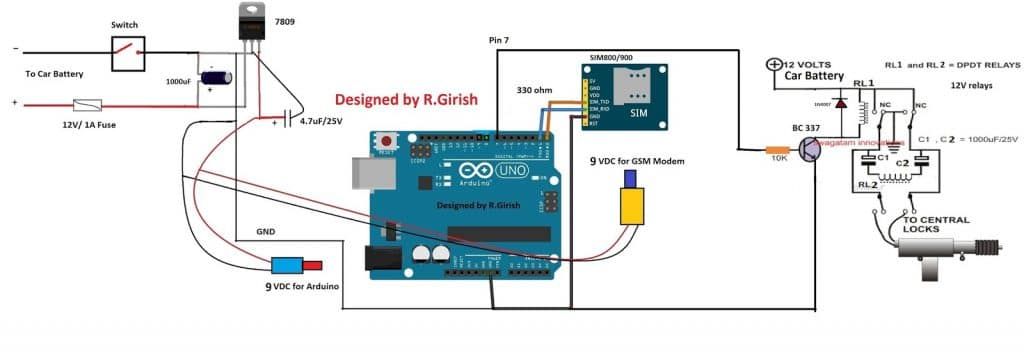
Keseluruhan persediaan dapat dilaksanakan seperti gambar di bawah:
Rajah Persediaan
 -
-
Sensor ultrasonik ditinggikan sekitar 3.5 kaki hingga 4 kaki di atas tanah ini dilakukan sehingga hanya dapat mengesan kenderaan dan manusia, kerana ketinggian rata-rata mereka hampir sama dan ketika anjing atau kucing atau haiwan lain yang biasanya berkeliaran di sekitar bandar akan tidak mencetuskan lampu jalan ke kecerahan maksimum.
Haiwan yang hidup dan berkeliaran di sekitar bandar ini tingginya di bawah 3.5 kaki.
Ketinggian sensor dapat disesuaikan untuk beroperasi pada tingkat optimum seperti yang dijelaskan dalam gambar di atas.
Jarak ambang dapat dikawal dalam program.
Apabila Arduino mengesan rintangan yang dikesan di bawah jarak yang telah ditentukan, lampu LED akan mencapai kecerahan puncak.
Kod Program:
//--------------------Program developed by R.Girish-------------------//
const int trigger = A1
const int echo = A2
int vcc = A0
int gnd = A3
int LED = 3
long Time
float distanceCM
float distanceM
float distance = 100 // set threshold distance in cm
int dim = 28 // adjust minimum brightness
int bright = 255 // adjust maximum brightness
float resultCM
float resultM
void setup()
{
pinMode(LED,OUTPUT)
pinMode(trigger,OUTPUT)
pinMode(echo,INPUT)
pinMode(vcc,OUTPUT)
pinMode(gnd,OUTPUT)
Serial.begin(9600)
}
void loop()
{
digitalWrite(vcc,HIGH)
digitalWrite(gnd,LOW)
digitalWrite(trigger,LOW)
delay(1)
digitalWrite(trigger,HIGH)
delayMicroseconds(10)
digitalWrite(trigger,LOW)
Time=pulseIn(echo,HIGH)
distanceCM=Time*0.034
resultCM=distanceCM/2
resultM=resultCM/100
Serial.print('Distance in cm: ')
Serial.println(resultCM)
Serial.print('Distance in meter: ')
Serial.println(resultM)
Serial.println('------------------------------------------')
if(resultCM<=distance)
{
analogWrite(LED, bright)
delay(10000)
}
if(resultCM>=distance)
{
analogWrite(LED,dim)
}
delay(100)
}
//-----------------Program developed by R.Girish-------------------//
CATATAN:
• Jarak ambang dapat disesuaikan dengan mengganti Nilai dengan yang anda sendiri.
jarak apungan = 100 // tetapkan jarak ambang dalam cm
Nilai mesti dimasukkan dalam sentimeter nilai maksimum boleh 400 hingga 500 cm atau 4 hingga 5 meter.
• Peredupan cahaya dapat disesuaikan dengan menggunakan
int redup = 28 // laraskan kecerahan minimum
255 adalah kecerahan maksimum 0 dimatikan.
Kita juga dapat menyaksikan jarak antara sensor dan halangan dalam monitor bersiri.

Sekiranya anda mempunyai pertanyaan lebih lanjut mengenai litar redup lampu jalan automatik berasaskan Arduino ini, jangan ragu untuk bertanya di bahagian komen.
Sebelumnya: Pemanas Induksi untuk Makmal dan Kedai Seterusnya: Litar Aplikasi Gym Fitness Timer Controlled