Pada era ini automasi industri , robot digunakan untuk menangani pelbagai proses untuk kualiti pengeluaran yang tepat dan lebih baik. Memilih motor yang ideal untuk robot yang sempurna selalu menjadi tugas yang sukar semasa merancang robot terutama untuk industri. Pemilihan tepat motor elektrik dalam robot industri memerlukan beberapa parameter untuk mengambil kira kawalan lengan, kedudukan, pergerakan sudut dan linier.

Motor yang Digunakan dalam Robotik Industri
Pemilihan motor adalah konsep yang paling tidak difahami untuk penggemar robotik yang memerlukan strategi dan analisis yang serius. Ini melibatkan dalam menentukan kelajuan robot, pecutan, keperluan tork berdasarkan berat robot, ukuran roda dan aplikasi di mana ia akan dilaksanakan. Terdapat banyak jenis motor terdapat di pasaran hari ini, tetapi kebanyakan motor pager kecil, motor servo , motor linear, motor stepper dan motor gear DC digunakan dalam robot industri mengikut kawasan aplikasinya.
Pemilihan motor yang tidak betul berakhir dengan robot cacat sehingga jenis motor apa yang paling sesuai dan sesuai untuk menjadikan robot perindustrian nyata, tepat dan mencukupi untuk memenuhi semua keperluan proses perindustrian sambil mengingat semua spesifikasi realistik?
Di sini kami mengumpulkan beberapa pandangan mengenai motor ini dari profesional industri untuk memilih motor yang sesuai untuk dipilih untuk aplikasi industri.
Kami menggalakkan anda untuk mengikuti pendapat pakar yang bertujuan untuk menyediakan motor terbaik untuk robotik industri dengan motor DC, stepper, brushless dan servo untuk pergerakan robot yang tepat, menjimatkan kos dan boleh dipercayai.
Ch.Sampath Kumar
M.tech dalam Reka Bentuk VLSI
Penulis Kandungan Teknikal
 Motor DC tersedia dalam jarak yang luas untuk operasi berterusan, tetapi memerlukan pengurangan gear agar sesuai dengan aplikasi yang sesuai. Motor stepper tidak memerlukan pengurangan roda gigi kerana operasi langkahnya memberikan kelajuan rendah untuk aplikasi yang ditentukan. Akhirnya motor servo digunakan untuk kawalan tepat dan tepat yang dilaksanakan dalam operasi gelung tertutup. Tetapi ia memerlukan maklum balas tambahan dan litar memandu sehingga lebih mahal daripada motor DC dan stepper. Oleh itu motor servo menjadikan robot lebih dipercayai kerana pergerakannya yang tepat.
Motor DC tersedia dalam jarak yang luas untuk operasi berterusan, tetapi memerlukan pengurangan gear agar sesuai dengan aplikasi yang sesuai. Motor stepper tidak memerlukan pengurangan roda gigi kerana operasi langkahnya memberikan kelajuan rendah untuk aplikasi yang ditentukan. Akhirnya motor servo digunakan untuk kawalan tepat dan tepat yang dilaksanakan dalam operasi gelung tertutup. Tetapi ia memerlukan maklum balas tambahan dan litar memandu sehingga lebih mahal daripada motor DC dan stepper. Oleh itu motor servo menjadikan robot lebih dipercayai kerana pergerakannya yang tepat.
Viswanath Prathap
M.Tech dalam Kejuruteraan Tenaga Elektrik
Penulis Kandungan Teknikal

Pilih dan letakkan Robot biasanya terdapat di industri untuk memilih objek dari satu kedudukan atau tempat dan meletakkannya di kedudukan atau tempat lain. Untuk tujuan ini, pergerakan sudut sendi robot perlu dikendalikan, yang dapat dicapai dengan menggunakan motor servo. Motor servo ini dikendalikan menggunakan data PWM yang diberikan oleh pengawal robot untuk menggerakkan sambungan robot. Motor servo mampu menghasilkan tork yang cukup untuk menggerakkan objek dengan cepat dari kedudukan berhenti. Oleh itu, ini digunakan sebagai roda dalam kenderaan robotik tentera dan industri. Motor stepper juga dapat digunakan untuk mengawal posisi tetapi ini akan menghabiskan kuasa walaupun pada waktu rehat hanya untuk mengunci dan menahan posisi yang diperintahkan. Jadi, motor servo biasanya digunakan dalam robotik industri sebagai pengganti prestasi tinggi dengan motor stepper.
S. Naresh Reddy
M.tech dalam Sistem Terbenam
Panduan projek
Struktur robot mekanik mesti dikawal untuk perfo  tugas rm. Terdapat tiga fasa yang berbeza untuk mengawal robot seperti persepsi, pemprosesan dan tindakan. Sensor memberikan maklumat mengenai kedudukan sendi dan efektor akhirnya kepada robot, kemudian maklumat ini diproses ke unit kawalan dan mengira isyarat yang sesuai ke motor yang bergerak secara mekanikal. Sebilangan besar robot menggunakan motor elektrik. Motor DC tanpa berus dan berus digunakan berulang kali dalam robot mudah alih dan motor AC digunakan dalam robot industri. Motor ini lebih disukai dalam sistem dengan beban yang lebih ringan, dan di mana bentuk gerakan yang dominan adalah putaran.
tugas rm. Terdapat tiga fasa yang berbeza untuk mengawal robot seperti persepsi, pemprosesan dan tindakan. Sensor memberikan maklumat mengenai kedudukan sendi dan efektor akhirnya kepada robot, kemudian maklumat ini diproses ke unit kawalan dan mengira isyarat yang sesuai ke motor yang bergerak secara mekanikal. Sebilangan besar robot menggunakan motor elektrik. Motor DC tanpa berus dan berus digunakan berulang kali dalam robot mudah alih dan motor AC digunakan dalam robot industri. Motor ini lebih disukai dalam sistem dengan beban yang lebih ringan, dan di mana bentuk gerakan yang dominan adalah putaran.
Suresh Megaji
M. Teknologi dalam Sistem Komunikasi Tanpa Wayar
Penulis Kandungan Teknikal

Sekiranya anda ingin terlibat dalam 'robotik' dan aplikasi mereka ke 'industri', seseorang harus mengetahui tentang 'Motors' yang digunakan dalam robotik kerana robotik kebanyakan bergantung pada motor. Pada dasarnya 'mesin robot' digunakan untuk aplikasi yang berbeza dalam pengeluaran. Motor yang berbeza seperti D.C, Pulsed, Stepper, Optical drive, Partial turn, dan hall effect motor, dll ... digunakan dengan beberapa teknik untuk menggunakannya dalam industri dan menjadikannya mesra, seperti
- Motor D.C digunakan untuk aplikasi berorientasikan bateri, kelajuan lebih lambat, aplikasi mobiliti.
- Di mana sahaja kita memerlukan aplikasi berorientasi putaran, kita dapat menggunakan motor Stepper seperti motor unipolar dan bipolar.
- Untuk pergerakan kepala dan lengan, kita boleh menggunakan motor giliran separa.
- Sekiranya kita mahu menggunakan medan magnet, kita boleh menggunakan Hall Effect dan motor pemacu optik dll.
Dengan menggunakan robotik yang menggunakan motor pintar, kita dapat menjimatkan wang, masa, ruang, pergerakan berbahaya dll.
Ajay Sahare
Eksekutif Pemasaran

Robot industri digunakan dalam persekitaran pembuatan industri. Ini adalah lengan yang dikembangkan khusus untuk aplikasi seperti pengelasan, pengendalian bahan, lukisan dan lain-lain.
Tidak setiap alat mekatronik yang digunakan dalam persekitaran industri dapat dianggap sebagai robot. Seperti yang ditentukan oleh ISO (International Standards Organisation), manipulator pelbagai guna yang dapat diprogram secara automatik, dapat diprogram ulang, dapat diprogramkan dalam tiga atau lebih paksi dianggap sebagai robot industri.
Motor yang digunakan dalam Robotik Industri adalah
- Motor Arus Batal (AC)
- Motor Arus Langsung (DC)
- Servo Motors
- Motor Stepper.
1. Motor AC boleh dibahagikan lagi kepada jenis tak segerak dan segerak. Sebagai contoh, motor AC induksi adalah unit jenis tak segerak yang pada asasnya terdiri daripada stator luka-wayar dan pemutar. Daya dihubungkan ke wayar dan arus AC yang mengalir melaluinya menyebabkan medan elektromagnetik (EM) di dawai melingkar, dengan medan yang cukup kuat memberikan kekuatan untuk gerakan rotor. Motor segerak adalah motor berkelajuan malar yang beroperasi segerak dengan frekuensi garis AC dan biasanya digunakan di mana kelajuan malar tepat diperlukan.
2. Banyak aplikasi industri, termasuk robotik, sering menggunakan motor DC kerana kemudahan mengawal kelajuan dan arah. Mereka mampu menjangkau jarak laju yang tidak terbatas, dari kelajuan penuh hingga sifar, dengan pelbagai beban.
Kerana motor DC mempunyai nisbah tork yang tinggi terhadap inersia, mereka dapat bertindak balas dengan cepat terhadap perubahan isyarat kawalan. Motor DC dapat dikendalikan dengan lancar hingga gerakan sifar dan dipercepat seketika ke arah yang bertentangan tanpa memerlukan litar beralih kuasa yang kompleks. Motor DC tanpa sikat magnet kekal biasanya lebih mahal daripada jenis berus, walaupun ia dapat memberikan kelebihan dalam penggunaan kuasa dan kebolehpercayaan.
Tanpa komutator, motor tanpa berus dapat beroperasi dengan lebih cekap dan pada kelajuan yang lebih tinggi daripada motor DC konvensional. Sebilangan besar motor DC tanpa berus berjalan pada bentuk gelombang trapezoidal, tetapi beberapa motor beroperasi dengan gelombang sinus. Motor tanpa sikat yang didorong oleh gelombang sinus dapat mencapai kelancaran operasi dengan kelajuan yang lebih rendah dengan riak tork yang rendah, menjadikannya sesuai untuk pengisaran, pelapisan, dan aplikasi lain seperti penamat permukaan.
Sekiranya motor Brushed DC, jika anda mahu motor anda berputar lebih perlahan tanpa kehilangan kuasa, anda boleh menggunakan modulasi lebar nadi (PWM). Ini pada dasarnya bermaksud menghidupkan dan mematikan motor dengan sangat pantas. Dengan cara ini, motor berputar dengan kelajuan yang lebih rendah seolah-olah voltan yang lebih rendah akan diterapkan tanpa menjaga kuasa.
Pada asasnya, tork yang dihasilkan oleh motor DC yang disikat terlalu kecil dan kelajuannya terlalu besar untuk berguna. Jadi, pengurangan gear biasanya digunakan untuk mengurangkan kelajuan dan meningkatkan tork.
3. Motor servo digunakan dalam sistem gelung tertutup dengan pengawal digital. Pengawal menghantar arahan halaju ke penguat pemacu, yang seterusnya memberi makan motor servo. Beberapa bentuk alat maklum balas, seperti penyelesai atau pengekod, memberikan maklumat mengenai kedudukan dan kelajuan motor servo. Penyelesai atau pengekod mungkin disatukan dengan motor atau terletak dari jauh. Kerana sistem gelung tertutup, motor servo dapat beroperasi dengan profil gerakan tertentu yang diprogramkan ke dalam pengawal.
4. Motor stepper dapat beroperasi dengan atau tanpa maklum balas, dengan putaran motor dipecah menjadi langkah sudut kecil. Ia dikendalikan oleh isyarat arahan berdenyut, dan dapat berhenti tepat pada titik perintah tanpa memerlukan brek atau unit kopling. Apabila kuasa dikeluarkan, motor stepper magnet kekal umumnya berada di kedudukan terakhirnya. Motor stepper berganda dapat dikekalkan secara segerak dengan menggerakkannya dari sumber yang sama.
Dev desai
Eksekutif Pemasaran 
Sekiranya anda merancang untuk terlibat dalam robotik, anda perlu membiasakan diri dengan banyak jenis motor yang ada, Semua pergerakan robotik bermotor dalam satu atau lain cara, jadi penting untuk mengetahui apa pilihan anda.
Motor DC
Selain dikendalikan dengan bateri, arah pergerakan motor DC ditentukan oleh kekutuban input daya. Ini adalah keperluan mutlak untuk fungsi robot. Nasib baik, motor jenis ini terdapat dalam pelbagai saiz, keperluan voltan, dan boleh didapati di mana-mana sahaja.
Jenis motor yang berbeza adalah seperti di bawah
- Motor asas mobiliti
- Motor hobi berkelajuan tinggi
- Motor pemacu tali pinggang
- Motor kereta slot
- Pulse dikendalikan
- Motor yang disesuaikan dengan lengan
- Stepper bipolar dengan penunjuk
Bio Motor
Bio-logam adalah bahan luar biasa yang telah ada selama beberapa tahun dan ia mempunyai sejumlah aplikasi dalam bidang robotik. Kita dapat melihat dalam ilustrasi, bahawa sekeping dawai bio-logam akan menyusut sebanyak lima peratus dari panjangnya apabila hanya beberapa volt digunakan di seberang itu. Setelah bertahun-tahun diuji, bio-wire terbukti kuat, boleh dipercayai, dan menjadi lebih berguna apabila produk baru muncul. Masa tindak balas yang agak perlahan menjadikannya sesuai untuk aplikasi lengan dan tangan robot, di mana jerkiness akan bermasalah. Sekeping dawai yang panjang dapat menghasilkan pergerakan yang ketara ketika meregangkan seluruh lengan robot. Terdapat peralatan lengan robot pada masa ini di pasaran komersial yang menggunakan logam logam.
Geganti
Relay, dalam robotik, hampir selalu digunakan untuk mengasingkan daya yang dimaksudkan untuk motor, dari bekalan kuasa untuk fungsi komputer. Motor, kerana impedansinya yang rendah, membuat permintaan arus yang tinggi pada bekalan kuasa dan membuat banyak gangguan yang tidak dapat ditoleransi oleh komputer. Oleh itu, adalah idea yang baik untuk menggunakan sumber arus tinggi yang berasingan untuk hanya motor.
Solenoid
Solenoid paling baik digunakan sebagai alat kawalan manipulator atau pengendali suis. Pergerakan mereka cepat dan kuat, jadi mata air hampir selalu digunakan dalam penggenggam untuk melembutkan aksi. Seperti yang anda lihat dalam ilustrasi, wayar kawalan digunakan untuk menutup penggenggam. Wayar kawalan ini juga boleh berfungsi sebagai mata air kembali. Pencengkam seperti ini banyak dijumpai di lini pengeluaran di mana tugasnya sangat diukur dan merangkumi parameter sempit.
Fungsi Sekunder
Sebilangan besar fungsi motor melibatkan pergerakan, lengan, kepala, atau beberapa pergerakan luaran yang kelihatan, namun, beberapa pergerakan motor tidak begitu kelihatan. Robot industri besar menggunakan sistem hidraulik yang menggunakan motor pam untuk menghasilkan tekanan operasi cecair hidraulik. Fungsi sekunder utama motor yang lain adalah penyesuaian terkawal. Untuk meningkatkan ketepatan, potensiometer yang dihubungkan dengan motor biasanya merupakan peranti berbelok.
Kesimpulannya
Robot boleh menjadi alat yang sangat kompleks yang memerlukan pelbagai pergerakan yang digerakkan oleh motor. Artikel ini bertujuan untuk memberi gambaran keseluruhan rangkaian peranti yang mungkin anda hadapi sebagai pembangun robot. Sebaiknya mulakan dengan membuat penyelidikan mengenai pembekal peralatan robotik dan persediaan yang ada. Terdapat sejumlah besar produk yang ada sekarang dan Internet menjadikannya senang dicari, dipelajari dan digunakan. Apa pun keperluan anda, sedikit kepintaran dan tekad yang mungkin dimiliki oleh semua pembangun robot harus melayani anda dengan baik.
Samadan Wandre
Eksekutif Pemasaran
'Motor yang digunakan dalam Robotik'
- Motor asas mobiliti

- Motor hobi berkelajuan tinggi
- Motor pemacu tali pinggang
- Motor kereta slot
- Pulse dikendalikan
- Motor yang disesuaikan dengan lengan
- Stepper bipolar dengan penunjuk

Motor yang lebih besar sangat sesuai untuk pangkalan pergerakan yang membolehkan robot menggerakkan kawasan. Sebilangan motor ini dilengkapi dengan kotak gear untuk menghasilkan kelajuan dan tork yang lebih perlahan yang diperlukan untuk pergerakan. Menurunkan voltan ke motor juga dapat melambatkannya ke kelajuan yang lebih diingini. Hanya eksperimen yang dapat menentukan sama ada motor anda akan beroperasi dengan voltan yang lebih rendah. Sekiranya berlaku, anda telah menyelamatkan banyak masalah, jika tidak, ada cara lain untuk melambatkan motor. Beberapa motor berkelajuan tinggi dapat digunakan jika roda gigi cacing atau roda gigi skru digunakan.
Contoh gear skru dapat dilihat pada ilustrasi lengan robot. Apabila motor berpusing mengikut arah jam, bolt ditarik ke motor dan lengan berkontraksi dan apabila berpusing berlawanan arah jam, lengan memanjang. Walaupun poros motor berpusing dengan pantas, tindakan lengan jauh lebih perlahan kerana pengurangan skru. Dalam gambaran litar motor berikut ini, kita melihat motor DC dikendalikan oleh transistor kuasa. Suis geganti (Double Pole Double Throw), menentukan arah. Transistor Q1 mestilah transistor kuasa untuk mengambil beban berat motor.
Motor berdenyut
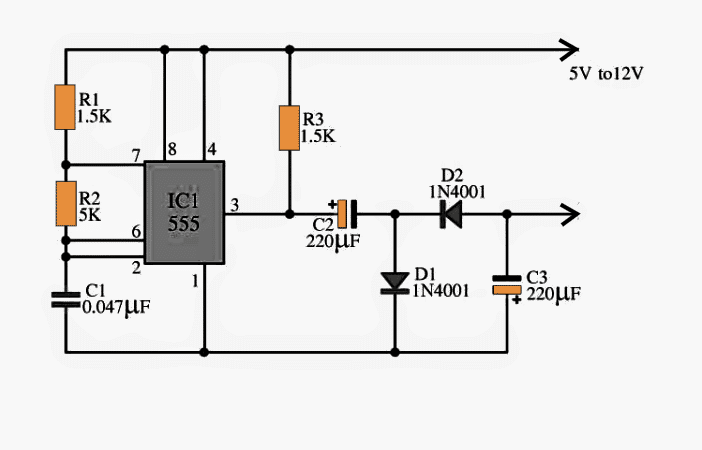
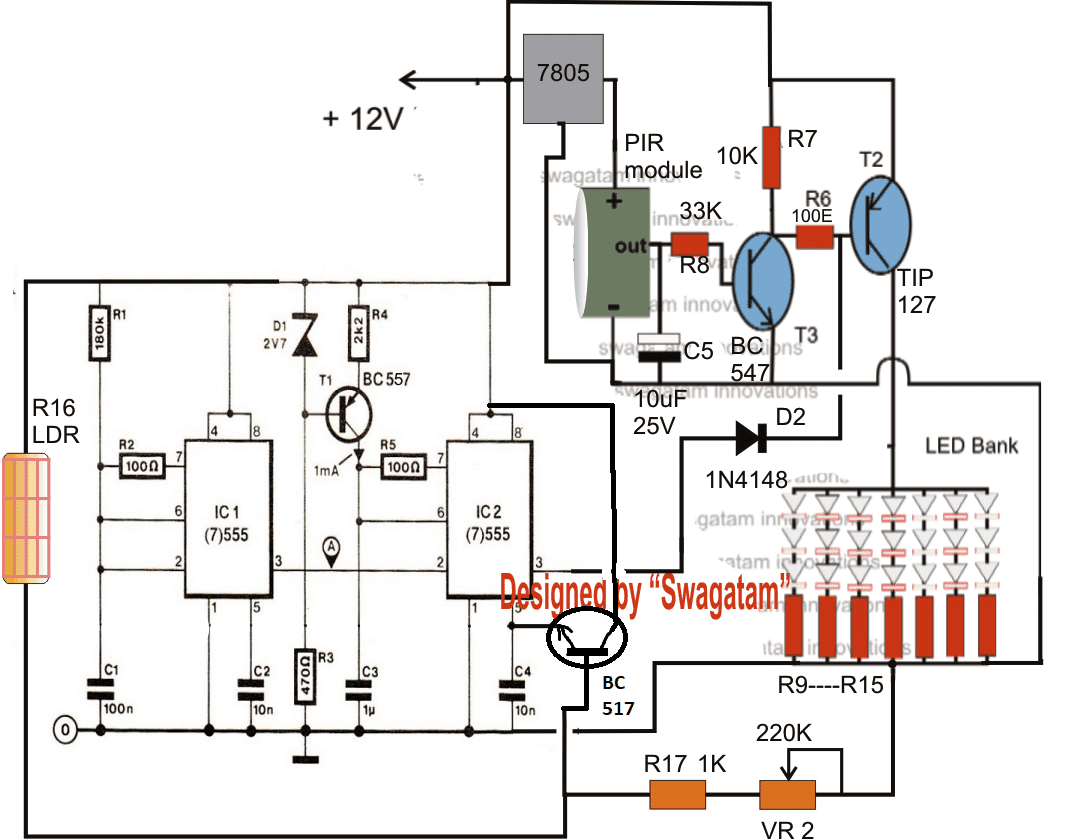
Beberapa motor memperoleh pengurangan kelajuan dengan beroperasi dari isyarat DC berdenyut. Isyarat ini biasanya sekitar seratus Hz. Kelajuan motor dapat diubah dengan mengubah lebar nadi, bukan dengan mengubah frekuensi nadi. Motor seperti ini boleh didapati di kedai elektronik lebihan dan dapat dikenali dengan mudah oleh penjana denyut yang bersambung dengannya. Mana-mana motor DC boleh didorong oleh sumber nadi, dan skema litar sedemikian disertakan.
Seperti yang anda lihat, pemasa 555 dipilih sebagai pengayun pemacu, yang menghasilkan frekuensi kira-kira 100 Hz. Perintang R1, dan kapasitor C, menstabilkan dan mengasingkan penjana nadi dari paku yang dihasilkan oleh motor. Oleh kerana peranti ini dapat menarik dari bekalan kuasa 6 hingga 12 volt, anda mungkin ingin menukar nilai kapasitor C4 dan C6 untuk hasil yang lebih baik, bergantung pada voltan apa yang anda gunakan. Output nadi diambil dari pin tiga IC1 dan dimasukkan ke pin dua IC2, juga pemasa 555.
Pemasa kedua mengubah lebar nadi dengan menyesuaikan voltan yang diumpankan ke kapasitor C6 melalui potensiometer R5 dan perintang R6. Tempoh nadi adalah yang menentukan kelajuan motor dan lebar nadi dapat disesuaikan dari 10% hingga 100%.
Transistor Q1 menerima isyarat modulasi lebar nadi melalui perintang R7. Oleh kerana Q1 adalah peranti arus rendah, ia menyampaikan isyarat ke Q2, transistor kuasa yang dapat menangani permintaan arus motor. Transistor ini tidak kritikal dan hampir semua jenis transistor kuasa arus rendah akan berfungsi. Relay akan menentukan arah motor yang akan diambil.
Motor Stepper
Motor yang paling kompleks adalah motor stepper. Seperti namanya, motor berubah secara bertahap dan dikendalikan oleh nadi. Tahap giliran tepat setiap langkah boleh berbeza dari satu pengeluar atau model yang lain, tetapi 20 darjah popular dan menghasilkan 18 langkah untuk satu putaran lengkap. Terdapat dua jenis motor stepper asas, bipolar dan unipolar. Seperti yang anda lihat dalam skema motor stepper, bipolar hanyalah motor yang dikendalikan oleh dua gegelung.
Jenis unipolar adalah dua gegelung dengan ketukan tengah. Sekiranya paip pusat tidak diendahkan, motor unipolar dapat beroperasi sebagai jenis bipolar. Dua gegelung dalam motor stepper diberi denyutan langkah secara bergantian dalam kekutuban dari gegelung ke gegelung. Peta proses ini disediakan dalam rajah kerja untuk menggambarkan tindakan motor secara grafik. Tidak seperti motor DC konvensional, tork menurun dengan kelajuan. Jenis unit pemacu khas juga diperlukan untuk memajukan motor stepper dan harus dibekalkan dengan motor. Anda tidak digalakkan membina unit kawalan melainkan motor dibekalkan dengan lembaran spesifikasi yang baik yang mempunyai cadangan komponen dan skema penuh.
Motor mungkin memerlukan penyangga untuk mengasingkannya dari sistem pemacu, atau mungkin memerlukan bekalan kuasa yang berasingan. Apa pun keperluannya, mereka mungkin berbeza dari satu motor ke motor yang lain. Kedai hobi adalah pembekal motor stepper yang paling dipercayai, dan walaupun kedai elektronik lebihan kadangkala memilikinya, mereka mungkin tidak memasukkan maklumat spesifikasi yang diperlukan
Motor Pusing Separa
Beberapa fungsi robot hanya memerlukan giliran separa, seperti pergerakan kepala atau lengan. Cara termudah untuk mencapainya adalah dengan berhenti kedudukan dan gear tergelincir. Gambaran mengenai perincian mekanikal motor jenis ini diberikan di atas. Suis mikro boleh digunakan sebagai sensor berhenti untuk mematikan daya dan menetapkan semula arah untuk tindakan selanjutnya.
Roda bawah disambungkan ke motor sementara roda atas dipisahkan dari roda bawah oleh sekeping keliling bulat. Apabila roda bawah berpusing roda atas berpusing dengannya sehingga pin berhenti bersentuhan dengan suis mikro. Beberapa reka bentuk tidak membuat peruntukan untuk menghentikan motor, jadi skru sederhana dengan spacer akan berfungsi sebagai motor berhenti.
Bio-Motor
Bio-logam adalah bahan luar biasa yang telah ada selama beberapa tahun dan ia mempunyai sejumlah aplikasi dalam bidang robotik. Kita dapat melihat dalam ilustrasi, bahawa sekeping dawai bio-logam akan menyusut sebanyak lima peratus dari panjangnya apabila hanya beberapa volt digunakan di seberang itu. Setelah bertahun-tahun diuji, bio-wire terbukti kuat, boleh dipercayai, dan menjadi lebih berguna apabila produk baru muncul. Masa tindak balas yang agak perlahan menjadikannya sesuai untuk aplikasi lengan dan tangan robot, di mana jerkiness akan bermasalah. Sekeping dawai yang panjang dapat menghasilkan pergerakan yang ketara ketika meregangkan seluruh lengan robot. Terdapat peralatan lengan robot pada masa ini di pasaran komersial yang menggunakan logam logam.
Bhaskar Singh
Eksekutif Pemasaran
 Robot industri adalah peranti yang pada tahap tertentu menggandakan gerakan manusia bersama dengan pengurangan bahaya, memberikan lebih banyak kekuatan, ketepatan dan kesinambungan. Mereka memerlukan pelbagai pergerakan yang digerakkan oleh motor bergantung pada mod operasi, pengendalian, alat yang digunakan dan pekerjaan yang akan dilakukan. Motor robot industri harus berpotensi untuk menangani pelbagai tugas daripada motor biasa untuk mengkhususkan diri pada tugas tertentu.
Robot industri adalah peranti yang pada tahap tertentu menggandakan gerakan manusia bersama dengan pengurangan bahaya, memberikan lebih banyak kekuatan, ketepatan dan kesinambungan. Mereka memerlukan pelbagai pergerakan yang digerakkan oleh motor bergantung pada mod operasi, pengendalian, alat yang digunakan dan pekerjaan yang akan dilakukan. Motor robot industri harus berpotensi untuk menangani pelbagai tugas daripada motor biasa untuk mengkhususkan diri pada tugas tertentu.
Motor elektrik paling sering digunakan dalam robotik industri kerana sumber tenaga yang sangat cekap dan reka bentuk yang agak sederhana yang menjadikannya pilihan yang lebih popular dari segi penilaian kos ke prestasi dalam semua aspek - pemasangan, penyelenggaraan dan servis.
Bergantung pada kerja yang diperlukan, motor yang berbeza digunakan untuk tujuan yang berbeza. Contohnya motor DC digunakan untuk pergerakan mengikut arah jam dan berlawanan arah jarum jam, contohnya dalam kren dan kerekan, motor berdenyut digunakan untuk memberikan pergerakan berdenyut menggunakan lebar denyut DC, motor giliran separa digunakan untuk memberikan pergerakan seperti kepala dan lengan dan yang paling kompleks - motor stepper digunakan untuk memberikan putaran bertahap dalam kenaikan darjah.
Lebih-lebih lagi, bergantung pada jenis pekerjaan, motor dengan penilaian dan ukuran yang berbeza digunakan untuk tujuan yang berbeza. Terdapat beberapa jenis motor yang masing-masing mempunyai aplikasi yang berlainan di tempat yang berbeza bergantung pada reka bentuk kerja dan robot.
Mohan Krishna. L
Eksekutif Jualan dan Sokongan
Robot digunakan untuk melakukan pekerjaan yang dapat dilakukan oleh manusia dan ada banyak sebab mengapa Robot lebih baik daripada Manusia. 
Terdapat dua jenis Robot utama iaitu: -
Robot Mudah Alih: Itu bergerak pada kaki atau trek.
Robot pegun: Yang mempunyai asas tetap.
Robot pegun biasanya Robot Arms dapat digunakan untuk mengambil objek atau melakukan pekerjaan lain yang melibatkan menjangkau objek.
Robot Arm mempunyai tiga bahagian asas: -
- Sendi bahu
- Sendi pergelangan tangan
- Pangkalan tetap
Perlukan robot untuk
- Keupayaan untuk bekerja dengan pantas dan persekitaran yang berbahaya.
- Berkebolehan mengulang tugas berulang kali.
- Berkebolehan bekerja dengan tepat.
- Berkebolehan melakukan tugas yang berbeza.
- Kecekapan.
Motor adalah peranti yang menukar tenaga elektrik kepada tenaga mekanikal, iaitu alat elektro-mekanikal. Terdapat dua jenis motor seperti Motor AC dan Motor DC
Motor yang digunakan dalam Robotik industri adalah Servo Motor. Motor servo adalah motor elektrik sederhana yang dikawal dengan bantuan mekanisme servo. Sekiranya motor yang dikendalikan dikendalikan oleh AC, ia dinamakan AC Servo motor sebaliknya motor DC Servo. Kebanyakan motor servo boleh berputar sekitar 90 hingga 180 darjah. Malah ada yang berputar melalui 360 darjah penuh atau lebih. Beberapa Aplikasi motor servo dalam Robotik adalah
- Aplikasi motor servo dalam robot iaitu, robot pilihan dan tempat yang mudah, ia digunakan untuk memilih objek dari satu posisi dan meletakkan objek pada posisi yang berbeza.
- Motor servo di Conveyor digunakan
- dalam industri Pembuatan dan pemasangan unit untuk menyampaikan objek dari satu stesen pemasangan ke stesen yang lain. Untuk Contoh: - Proses Pengisian Botol.
- Motor servo dalam kenderaan Robotik di sini motor Servo yang digunakan di Wheels. Oleh kerana motor servo putaran berterusan digunakan.
Dinesh.P
Eksekutif Pemasaran
 Robot diperkenalkan untuk mengurangkan kerja keras manusia dan membantu memberi nasib baik kepada manusia untuk perkembangan masa depan. Istilah robot bermaksud mesin yang meniru pelbagai ciri manusia. Robotik merangkumi pengetahuan kejuruteraan mekanikal, elektronik, elektrik & sains Komputer. Motor yang digunakan dalam Robot adalah DC Motors, Stepper Motors dan Servo Motors
Robot diperkenalkan untuk mengurangkan kerja keras manusia dan membantu memberi nasib baik kepada manusia untuk perkembangan masa depan. Istilah robot bermaksud mesin yang meniru pelbagai ciri manusia. Robotik merangkumi pengetahuan kejuruteraan mekanikal, elektronik, elektrik & sains Komputer. Motor yang digunakan dalam Robot adalah DC Motors, Stepper Motors dan Servo Motors
Di mana,
- Motor DC digunakan untuk Putaran berterusan
- Stepper Motors digunakan untuk putaran pada beberapa darjah
- Servo Motors digunakan untuk penentuan kedudukan, ia dapat digunakan di dalam kereta dan pesawat
Ganesh .J
Eksekutif Pemasaran 
Robot digunakan untuk melakukan pekerjaan yang dapat dilakukan oleh manusia dan juga mengurangkan usaha dan waktu manusia dan meningkatkan kualiti. Motor yang digunakan dalam robotik industri adalah
- Motor Arus Batal (AC)
- Motor Arus Langsung (DC)
- Servo Motors
- Motor Stepper.