Litar lengan robot ini yang juga dapat dilaksanakan seperti kren robotik, berfungsi menggunakan 6 motor servo dan dapat dikendalikan melalui alat kawalan jauh mikrokontroler , menggunakan pautan komunikasi 2.4 GHz berasaskan Arduino.
Ciri-ciri utama
Semasa anda membangun sesuatu yang canggih seperti lengan robot, ia mesti kelihatan moden dan mesti merangkumi banyak ciri canggih, dan bukan hanya sekadar mainan seperti fungsi.
Reka bentuk lengkap yang dicadangkan relatif mudah dibina, namun dikaitkan dengan beberapa fungsi manuver canggih, yang dapat dikendalikan dengan tepat melalui perintah tanpa wayar atau kawalan jauh. Reka bentuknya juga serasi untuk kegunaan industri, sekiranya motor ditingkatkan.
Ciri utama kren mekanikal ini seperti lengan robot adalah:
- 'Lengan' yang boleh dilaraskan secara berterusan melebihi paksi menegak 180 darjah.
- 'Siku' yang boleh dilaraskan secara berterusan di atas paksi menegak 180 darjah.
- 'Cubit jari' atau Grip yang boleh dilaraskan secara berterusan di atas paksi menegak 90 darjah.
- 'Lengan' yang boleh dilaraskan secara berterusan di atas satah mendatar 180 darjah.
- Keseluruhan sistem robot atau lengan kren boleh digerakkan dan digerakkan seperti a kereta kawalan jauh .
Simulasi Kerja Kasar
Beberapa ciri yang dijelaskan di atas dapat dilihat dan difahami dengan bantuan simulasi GIF berikut:

Kedudukan Mekanisme Motor
Gambar berikut memberi kita gambaran yang jelas mengenai pelbagai kedudukan motor dan mekanisme gear yang berkaitan yang perlu dipasang untuk melaksanakan projek:

Dalam reka bentuk ini kami memastikan untuk menjaga segala sesederhana mungkin sehingga orang awam dapat memahami mengenai mekanisme motor / gear yang terlibat. dan tidak ada yang tersembunyi di sebalik mekanisme yang kompleks.
Cara kerja atau fungsi setiap motor dapat difahami dengan bantuan perkara berikut:
- Motor # 1 mengawal 'cubitan jari' atau sistem cengkaman robot. Elemen bergerak secara langsung berengsel dengan batang motor untuk pergerakannya.
- Motor # 2 mengawal mekanisme siku sistem. Ia dikonfigurasi dengan sistem gear egde yang mudah untuk melaksanakan pergerakan mengangkat.
- Motor # 3 bertanggungjawab mengangkat seluruh sistem lengan robot secara menegak, oleh itu motor ini perlu lebih berkuasa daripada kedua-dua yang di atas. Motor ini juga diintegrasikan menggunakan mekanisme roda gigi untuk memberikan tindakan yang diperlukan.
- Motor # 4 mengawal keseluruhan mekanisme kren ke atas satah mendatar 360 darjah penuh, sehingga lengan dapat memilih atau mengangkat objek dalam penuh mengikut arah jam atau berlawanan arah jam julat jejari.
- Motor # 5 dan 6 bertindak seperti roda untuk platform yang membawa keseluruhan sistem. Motor-motor ini dapat dikendalikan dengan memindahkan sistem dari satu tempat ke tempat lain dengan mudah, dan ini juga memudahkan pergerakan sistem timur / barat, utara / selatan hanya dengan menyesuaikan kelajuan motor kiri / kanan. Ini hanya dilakukan dengan mengurangkan atau menghentikan salah satu dari dua motor tersebut, misalnya untuk memulai putaran sisi kanan, motor sisi kanan dapat dihentikan atau dihentikan hingga putaran dijalankan sepenuhnya atau ke sudut yang diinginkan. Begitu juga, untuk memulakan putaran kiri lakukan perkara yang sama dengan motor kiri.
Roda belakang tidak mempunyai motor yang terkait dengannya, ia berengsel untuk bergerak bebas pada paksi pusatnya dan mengikuti manuver roda depan.
Litar Penerima Tanpa Wayar
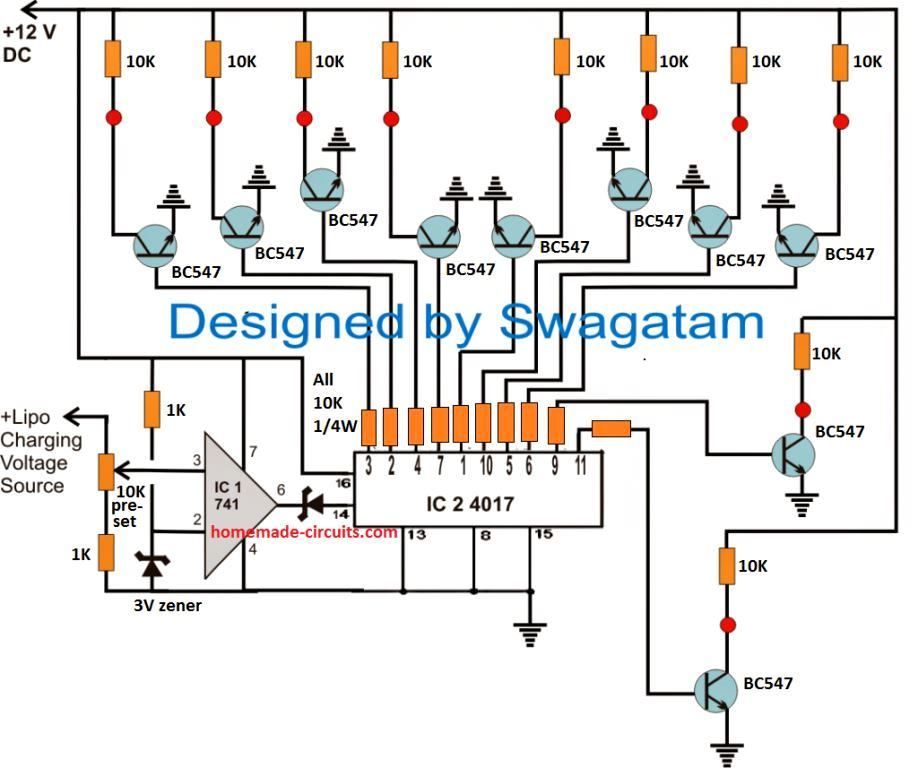
Oleh kerana keseluruhan sistem dirancang untuk berfungsi dengan alat kawalan jauh, penerima tanpa wayar perlu dikonfigurasi dengan motor yang dijelaskan di atas. Dan ini mungkin dilakukan dengan menggunakan rangkaian berdasarkan Arduino berikut.

Seperti yang anda lihat, terdapat 6 motor servo yang dilampirkan dengan output Arduino dan masing-masing dikendalikan melalui isyarat kawalan jauh yang ditangkap oleh sensor terpasang NRF24L01.
Isyarat diproses oleh sensor ini dan disalurkan ke Arduino yang memberikan pemprosesan ke motor yang relevan untuk operasi kawalan kelajuan yang dimaksudkan.
Sinyal dihantar dari litar Pemancar yang mempunyai potensiometer. Pelaras penyesuaian pada potensiometer ini mengawal tahap kelajuan pada motor yang berkaitan dengan litar penerima yang dijelaskan di atas.
Sekarang mari kita lihat bagaimana rangkaian pemancar:
Modul Pemancar

Reka bentuk pemancar dapat dilihat mempunyai 6 potensiometer yang terpasang dengan papan Arduino dan juga dengan alat pautan komunikasi 2.4 GHz yang lain.
Setiap periuk diprogramkan untuk mengawal motor yang sepadan dikaitkan dengan litar penerima. Oleh itu, apabila pengguna memutar poros potensiometer pemancar yang dipilih, motor lengan robot yang sesuai mula bergerak dan melaksanakan tindakan bergantung pada kedudukan spesifiknya pada sistem.
Mengawal Lebihan Motor
Anda mungkin tertanya-tanya bagaimana motor mengehadkan pergerakan mereka di rentang bergerak mereka, kerana sistem ini tidak mempunyai pengaturan yang membatasi untuk mencegah motor daripada memuatkan beban apabila pergerakan mekanisme masing-masing mencapai titik penamatnya?
Maksudnya, misalnya apa yang berlaku sekiranya motor tidak dihentikan walaupun setelah 'grip' memegang objek dengan erat?
Penyelesaian paling mudah untuk ini adalah dengan menambahkan individu modul kawalan semasa dengan masing-masing motor sehingga dalam keadaan seperti itu motor tetap dihidupkan dan dikunci tanpa terbakar atau berlebihan.
Oleh kerana kawalan arus aktif, motor tidak mengalami beban berlebihan, atau keadaan arus lebihan, dan mereka tetap beroperasi dalam jarak selamat yang ditentukan.
Kod Program yang lengkap boleh didapati dalam artikel ini
Sebelumnya: Penguat Audio USB 5V untuk Pembesar suara PC Seterusnya: 7 Litar Inverter Wave Sine Modified Terokai - 100W hingga 3kVA