Dalam catatan ini kita mempelajari litar pemasa ke hadapan terbalik untuk mengendalikan mekanisme motor inkubator dengan set pergerakan yang disukai. Idea itu diminta oleh Encik Anwar
Spesifikasi teknikal
Saya berasal dari Indonesia ..... Saya Memerlukan Skema Untuk Pemasa Inkubator dengan Motor Tork Tinggi (Window Power Motor DC di dalam Kereta). Saya cuba mendapatkan motor DC untuk bergerak dalam dua arah sehingga ia mencapai kedudukan akhir kemudian berhenti dan beralih kekutuban sehingga ia akan bergerak ke arah yang lain apabila kuasa digunakan semula. Kemudian lakukan perkara yang sama di hujung yang lain.
1. pemasa menghidupkan kuasa selama 1 minit. (7:00 pagi - 7:00 pagi)
2. motor berjalan dalam satu arah sehingga mencecah kedudukan berhenti, katakan 30 saat.
3. kuasa motor dimatikan apabila menyentuh kedudukan berhenti dan kelewatan selama 1 minit. pemasa untuk menamatkan / mematikan kuasa utama. juga membalikkan kekutuban sehingga.
4. lain kali pemasa utama menyala (10: 00-10: 01) ia menggunakan perkara yang sama dalam arah terbalik dan berulang secara berterusan
5. 12 VDC Motor Reverse (Hanya dua kabel dari motor + dan -)
6. Perlu Indikator Led untuk motor Rev / Fwd
Bolehkah anda Membantu saya Tuan?
Terima kasih terlebih dahulu atas sebarang bantuan.
Ini adalah projek rumah penting yang perlu dipercayai 100%.
Rekaan

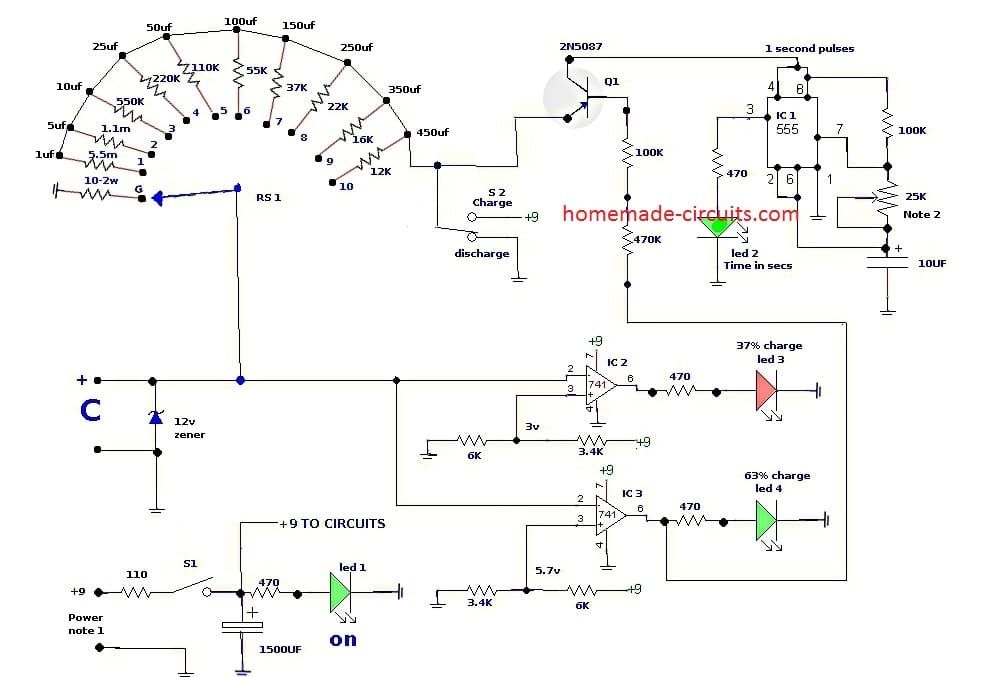
Pada gambar di atas kita dapat memvisualisasikan suatu rancangan untuk melaksanakan gerakan maju mundur motor inkubator yang dicadangkan setelah satu set selang waktu yang telah ditentukan.
Pada masa apabila kuasa dihidupkan, kita mempunyai senario berikut:
Suis magnet untuk 'set' boleh dianggap dalam keadaan dinonaktifkan atau tertekan ketika motor atau mekanisme inkubator yang dirancang berada dalam kedudukan permulaan sifar.
Harap maklum bahawa sebaiknya suis 'set' / 'reset' harus dilaksanakan menggunakan suis reed magnetik.
Dengan daya dihidupkan, IC 4060 diset semula melalui C2 sehingga memulai proses penghitungannya dari nol, dan pin3 diberikan logik nol.
Logik sifar awal ini disalurkan melalui C3 ke pangkal T1 yang dengan serta-merta melakukan memaksa T3 dan geganti yang berkaitan untuk diaktifkan. R7 dalam proses memastikan T1 / T3 terkunci dalam mod ini.
Relay DPDT pada titik ini bergerak pada kenalan N / O yang memulakan motor dan mekanisme ke arah gerakan 'maju' yang diandaikan.
Sebaik sahaja motor mula bergerak, butang 'set' dilepaskan sehingga T4 dan SPDT atas mendapat peluang untuk bergerak, di mana relay SPDT mencapai pertukaran kedudukan N / O yang menjadikan kenalan N / C DPDT dengan keadaan bersedia membekalkan ..
Motor dan / atau mekanisme terus bergerak hingga mencapai posisi 'reset' yang menyebabkan T2 mengaktifkan dan mematahkan kait T1 / T4.
Dengan T4 dimatikan, relay DPDT mengubah kedudukannya dari N / O ke N / C dan memberikan pergerakan yang berlawanan (terbalik) ke mekanisme motor.
Mekanisme motor inkubator kini membalikkan arahnya dan memulakan gerakan terbalik sehingga mencapai titik 'set' yang dengan cepat mematikan pemacu asas T4, SPDT mematikan kuasa pemotongan DPDT dan seluruh mekanisme berhenti .
Sementara itu IC 4060 terus menghitung sehingga ia sekali lagi menghasilkan logik sifar setelah melalui logik tinggi di pin3nya (dengan melepaskan C3).
Kitaran sekali lagi dimulakan dan mengulangi prosedur seperti yang dijelaskan di atas.
Sebelumnya: Berkedip LED dengan Arduino - Tutorial Lengkap Seterusnya: Penerokaan Lonjakan Kekuatan Industri Tinggi