Dalam tempoh 18ikaabad itu sendiri, terdapat evolusi motor DC. Perkembangan motor DC telah meningkat secara meluas dan digunakan secara signifikan di pelbagai industri. Pada awal tahun 1800-an dan dengan penambahbaikan yang dibuat pada tahun 1832, motor DC pada mulanya dikembangkan oleh penyelidik British Sturgeon. Dia mencipta motor DC jenis komutator awal di mana ia mempunyai keupayaan untuk mensimulasikan mesin juga. Tetapi seseorang mungkin tertanya-tanya apakah fungsi motor DC dan mengapa penting untuk mengetahui mengenai kawalan kelajuan motor DC. Jadi, artikel ini dengan jelas menerangkan pengoperasiannya dan pelbagai teknik pengendalian kelajuan.
Apa itu Motor DC?
Motor Dc dikendalikan dengan menggunakan arus terus di mana ia mengubah tenaga elektrik yang diterima menjadi tenaga mekanikal. Ini mencetuskan perubahan putaran pada peranti itu sendiri sehingga memberikan kuasa untuk mengendalikan pelbagai aplikasi dalam beberapa domain.
Kawalan kelajuan motor DC adalah salah satu ciri motor yang paling berguna. Dengan mengawal kelajuan motor, anda dapat mengubah kelajuan motor mengikut keperluan dan dapat memperoleh operasi yang diperlukan.
Mekanisme kawalan kelajuan berlaku dalam banyak keadaan seperti mengawal pergerakan kenderaan robot, pergerakan motor di kilang kertas, dan pergerakan motor di dalam lif di mana pelbagai jenis motor DC digunakan.
Prinsip Kerja DC Motor
Motor DC sederhana berfungsi berdasarkan prinsip bahawa semasa konduktor yang membawa arus diletakkan di a magnet setia d, ia mengalami daya mekanikal. Dalam motor DC praktikal, angker adalah konduktor yang membawa arus dan medan menyediakan medan magnet.
Apabila konduktor (angker) dibekalkan dengan arus, ia menghasilkan fluks magnetnya sendiri. Fluks magnetik sama ada menambah fluks magnet kerana belitan medan dalam satu arah atau membatalkan fluks magnet kerana belitan medan. Pengumpulan fluks magnetik dalam satu arah berbanding yang lain memberikan daya pada konduktor, dan oleh itu, ia mula berputar.
Menurut undang-undang aruhan elektromagnetik Faraday, tindakan berputar konduktor menghasilkan EMF . EMF ini, menurut undang-undang Lenz, cenderung menentang penyebabnya, iaitu voltan yang dibekalkan. Oleh itu, motor DC mempunyai ciri khas untuk menyesuaikan torknya sekiranya terdapat beban yang berbeza kerana EMF belakang.
Mengapa Kawalan Kelajuan Motor DC Penting?
Kawalan kelajuan di mesin menunjukkan kesan pada kelajuan putaran motor di mana pengaruh langsung ini terhadap fungsi mesin dan sangat penting untuk prestasi dan hasil prestasi. Pada masa penggerudian, setiap jenis bahan mempunyai kelajuan putarannya sendiri dan ia juga berubah berdasarkan ukuran gerudi.
Dalam senario pemasangan pam, akan berlaku perubahan pada kadar throughput dan jadi tali sawat perlu selari dengan kelajuan fungsi peranti. Faktor-faktor ini datang sama ada secara langsung atau tidak langsung bergantung pada kelajuan motor. Oleh kerana itu, seseorang harus mempertimbangkan kelajuan motor DC dan memerhatikan pelbagai jenis kaedah kawalan kelajuan.
Kawalan kelajuan Motor DC dilakukan sama ada dilakukan secara manual oleh pekerja atau dengan menggunakan alat kawalan automatik. Ini sepertinya berbeza dengan batasan kecepatan di mana harus ada pengaturan kecepatan yang menentang variasi kecepatan alami karena variasi beban poros.
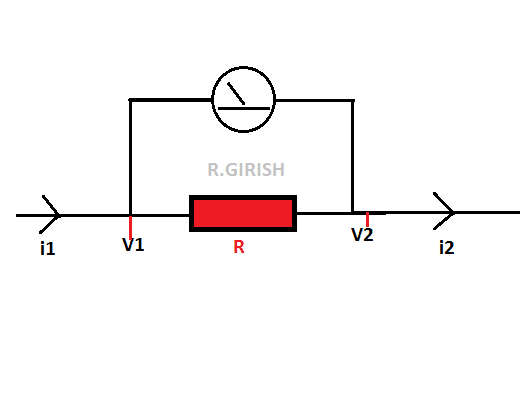
Prinsip Kawalan Kelajuan
Dari rajah di atas, persamaan voltan sederhana Motor DC adalah
V = Eb + IaRa
V adalah voltan yang dibekalkan, Eb adalah EMF belakang, Ia adalah arus angker, dan Ra adalah rintangan angker.
Kita sudah tahu bahawa
Eb = (PøNZ) / 60A.
P - bilangan tiang,
A - pemalar
Z - bilangan konduktor
N- kelajuan motor
Menggantikan nilai Eb dalam persamaan voltan, kita dapat
V = (PøNZ) / 60A) + IaRa
Atau, V - IaRa = (PøNZ) / 60A
iaitu, N = (PZ / 60A) (V - IaRa) / ø
Persamaan di atas juga boleh ditulis sebagai:
N = K (V - IaRa) / ø, K ialah pemalar
Ini membayangkan tiga perkara:
- Kelajuan motor berkadar terus dengan voltan bekalan.
- Kelajuan motor berkadar songsang dengan penurunan voltan angker.
- Kelajuan motor berkadar songsang dengan fluks kerana penemuan lapangan
Oleh itu, kelajuan motor DC dapat dikawal dengan tiga cara:
- Dengan mengubah voltan bekalan
- Dengan mengubah fluks, dan dengan mengubah arus melalui penggulungan medan
- Dengan mengubah voltan angker, dan dengan mengubah rintangan angker
Pelbagai Teknik Kawalan Kelajuan Motor DC
Oleh kerana terdapat dua jenis motor DC, di sini kita akan membincangkan dengan jelas kaedah kawalan kelajuan kedua-dua siri DC dan motor shunt.
Kawalan Kelajuan Motor DC dalam Jenis Siri
Ia boleh dikategorikan kepada dua jenis dan ia adalah:
- Teknik kawalan angker
- Teknik kawalan lapangan
Teknik pengawalan angker dikelaskan lagi kepada tiga jenis
- Rintangan terkawal angker
- Kawalan angker yang dijauhi
- Voltan terminal angker
Rintangan terkawal angker
Teknik ini paling banyak digunakan di mana rintangan pengawalseliaan mempunyai kaitan siri dengan bekalan motor. Gambar di bawah menerangkan perkara ini.

Kawalan Rintangan Angker
Kehilangan daya yang berlaku dalam rintangan pengendalian motor siri DC dapat diabaikan kerana teknik mengatur ini kebanyakannya digunakan untuk jangka waktu yang panjang untuk menurunkan kecepatan pada saat senario pemuatan cahaya. Ini adalah teknik yang menjimatkan untuk daya kilas berterusan dan terutama dilaksanakan dalam mengemudi kren, kereta api, dan kenderaan lain.
Kawalan Armature Shunted
Di sini, rheostat akan berada dalam rangkaian dan hubungan shunting dengan angker. Akan ada perubahan pada tahap voltan yang diterapkan pada angker dan ini berbeza dengan mengubah seri rheostat . Manakala perubahan arus pengujaan berlaku dengan mengubah shhe rheostat. Teknik mengawal kelajuan pada motor DC ini tidak begitu mahal kerana kehilangan kuasa yang signifikan dalam ketahanan peraturan kelajuan. Kelajuan dapat diatur sampai batas tertentu tetapi tidak melebihi tahap kelajuan normal.

Kaedah Kawalan Kelajuan Motor DC Shunted Armature
Voltan Terminal Armature
Kelajuan motor siri DC juga dapat dilakukan melalui bekalan kuasa ke motor menggunakan voltan bekalan bervariasi individu, tetapi pendekatan ini mahal dan tidak dilaksanakan secara meluas.
Teknik yang dikendalikan di lapangan dikelaskan kepada dua jenis:
- Penyelam Medan
- Mengendalikan medan yang diketuk (kawalan lapangan yang diketuk)
Teknik Field Diverter
Teknik ini menggunakan pengubah. Laju fluks yang berada di seberang lapangan dapat dikurangi dengan menggeser sebagian arus motor di medan seri. Semakin rendah rintangan pengalih, arus medan kurang. Teknik ini digunakan untuk lebih dari jarak kelajuan normal dan dilaksanakan di seluruh pemacu elektrik di mana kelajuan meningkat apabila terdapat penurunan beban.

Kawalan Kelajuan Motor DC Diverter Lapangan
Mengendalikan Medan Toreh
Di sini juga, dengan pengurangan fluks, kelajuan akan meningkat dan dicapai dengan mengurangkan putaran belitan medan dari tempat aliran arus berlaku. Di sini, jumlah penyadapan di belitan lapangan dikeluarkan dan teknik ini digunakan dalam daya tarikan elektrik.
Kawalan Kelajuan DC Shunt Motor
Ia boleh dikategorikan kepada dua jenis dan ia adalah:
- Teknik kawalan lapangan
- Teknik kawalan angker
Kaedah Kawalan Medan untuk Motor DC Shunt
Dalam kaedah ini, fluks magnet yang disebabkan oleh belitan medan berubah-ubah untuk mengubah kelajuan motor.
Oleh kerana fluks magnet bergantung pada arus yang mengalir melalui belitan medan, ia dapat diubah dengan mengubah arus melalui belitan medan. Ini dapat dicapai dengan menggunakan perintang berubah dalam satu siri dengan perintang penggulungan medan.
Pada mulanya, apabila perintang berubah-ubah disimpan pada kedudukan minimumnya, arus undian mengalir melalui belitan medan kerana voltan bekalan yang dinilai, dan sebagai hasilnya, kelajuan tetap normal. Apabila rintangan meningkat secara beransur-ansur, arus melalui belitan medan berkurang. Ini seterusnya mengurangkan fluks yang dihasilkan. Oleh itu, kelajuan motor meningkat melebihi nilai normalnya.
Kaedah Kawalan Rintangan Armature untuk DC Shunt Motor
Dengan kaedah ini, kelajuan motor DC dapat dikawal dengan mengawal rintangan angker untuk mengawal penurunan voltan di bahagian angker. Kaedah ini juga menggunakan perintang yang berubah-ubah secara bersiri dengan angker.
Apabila perintang berubah-ubah mencapai nilai minimumnya, rintangan angker berada pada tahap normal, dan oleh itu, voltan angker turun. Apabila nilai rintangan meningkat secara beransur-ansur, voltan merentasi angker menurun. Ini seterusnya menyebabkan penurunan kelajuan motor.
Kaedah ini mencapai kelajuan motor di bawah julat normalnya.
Kaedah kawalan voltan angker untuk DC Shunt Motor (Kaedah Leonard Ward)
Teknik Ward Leonard dari Litar kawalan kelajuan motor DC ditunjukkan seperti berikut:
Dalam gambar di atas, M adalah motor utama di mana kelajuannya harus diatur dan G sesuai dengan penjana DC yang teruja secara individu di mana ini didorong dengan menggunakan motor tiga fasa dan mungkin motor sinkron atau induksi. Corak kombinasi penjana DC dan motor yang digerakkan AC ini disebut sebagai set M-G.
Voltan penjana diubah dengan mengubah arus medan penjana. Tahap voltan ini apabila diberikan ke bahagian angker motor DC dan kemudian M berubah-ubah. Untuk memastikan fluks medan motor tetap, arus medan motor harus dikekalkan sebagai tetap. Apabila kelajuan motor diatur, maka arus angker untuk motor harus sama dengan tahap pengenal.
Arus medan yang dihantar akan berbeza sehingga tahap angker voltan berbeza dari '0' ke tahap yang dinilai. Sebagai peraturan kecepatan sesuai dengan arus pengenal dan dengan arus fluks motor yang berterusan dan fluks medan sampai saat kecepatan pengenal dicapai. Dan kerana kekuatannya adalah produk dari kelajuan dan tork dan ia mempunyai bahagian langsung dengan kelajuan. Dengan ini, apabila terdapat kenaikan kuasa, kelajuan akan meningkat.
Kedua-dua kaedah yang disebutkan di atas tidak dapat memberikan kawalan kelajuan dalam jarak yang diinginkan. Lebih-lebih lagi, kaedah kawalan fluks boleh mempengaruhi pergantian, sedangkan kaedah kawalan angker melibatkan kehilangan daya yang besar kerana penggunaan perintang secara bersiri dengan angker. Oleh itu, kaedah yang berbeza sering diinginkan - kaedah yang mengawal voltan bekalan untuk mengawal kelajuan motor.
Oleh itu, dengan teknik Ward Leonard, pemacu kuasa yang dapat disesuaikan dan nilai tork yang tetap diperoleh dari tahap kelajuan minimum hingga tahap kelajuan asas. Teknik regulasi fluks medan digunakan terutamanya ketika tahap kelajuan lebih tinggi daripada kecepatan dasar.
Di sini, dalam fungsi, arus angker disimpan pada tahap tetap pada nilai yang ditentukan dan nilai voltan penjana dikekalkan pada pemalar. Dalam kaedah sedemikian, belitan medan menerima voltan tetap, dan angker mendapat voltan berubah.
Salah satu teknik kaedah kawalan voltan tersebut melibatkan penggunaan mekanisme switchgear untuk memberikan voltan berubah ke angker, dan yang lain menggunakan Generator yang digerakkan oleh motor AC untuk memberikan voltan berubah-ubah ke armature ( Sistem Ward-Leonard ).
The kelebihan & kekurangan wad Leonard metho d adalah:
Manfaat menggunakan teknik Ward Leonard untuk kawalan kelajuan motor DC adalah seperti berikut:
- Di kedua arah, seseorang dapat mengawal kelajuan peranti dengan lancar untuk jarak yang lebih jauh
- Teknik ini mempunyai keupayaan brek intrinsik
- Volt-ampere reaktif yang tertinggal diimbangi melalui pemacu dan motor segerak yang sangat teruja bertindak sebagai pemacu sehingga akan berlaku kenaikan faktor kuasa
- Apabila terdapat beban berkelip, motor pemacu adalah Induksi motor mempunyai roda gila yang digunakan untuk mengurangkan beban kilat ke tahap minimum
Kelemahan teknik Ward Leonard adalah:
- Kerana teknik ini mempunyai satu set motor dan generator, kosnya lebih tinggi
- Perancangan ini rumit untuk direka dan juga berat
- Memerlukan lebih banyak ruang untuk pemasangan
- Memerlukan penyelenggaraan berkala dan asas tidak menjimatkan
- Akan ada kerugian besar dan kecekapan sistem dikurangkan
- Lebih banyak bunyi dihasilkan
Dan juga aplikasi kaedah Ward Leonard lancar mengawal kelajuan di motor DC. Beberapa contohnya ialah pengangkut lombong, kilang kertas, lif, kilang penggilingan, dan kren.
Selain daripada dua teknik ini, teknik yang paling banyak digunakan adalah kawalan kelajuan motor dc menggunakan PWM untuk mencapai kawalan kelajuan motor DC. PWM melibatkan penggunaan denyut lebar yang berbeza-beza kepada pemandu motor untuk mengawal voltan yang dikenakan pada motor. Kaedah ini terbukti sangat cekap kerana kehilangan kuasa minimum, dan tidak melibatkan penggunaan peralatan yang kompleks.

Kaedah Kawalan Voltan
Gambarajah blok di atas mewakili sederhana pengawal kelajuan motor elektrik . Seperti yang digambarkan dalam rajah blok di atas, mikrokontroler digunakan untuk memberi isyarat PWM kepada pemandu motor. Pemacu motor adalah IC L293D yang terdiri daripada litar H-bridge untuk menggerakkan motor.
PWM dicapai dengan memvariasikan denyutan yang dikenakan pada pin membolehkan IC pemandu motor untuk mengawal voltan motor yang digunakan. Variasi denyutan dilakukan oleh mikrokontroler, dengan isyarat input dari butang tekan. Di sini, dua butang tekan disediakan, masing-masing untuk mengurangkan dan meningkatkan kitaran denyutan.
Oleh itu, artikel ini telah memberikan penjelasan terperinci mengenai pelbagai teknik kawalan kelajuan motor DC dan bagaimana kawalan kelajuan paling penting untuk diperhatikan. Lebih disarankan untuk mengetahui mengenai pengawal kelajuan motor 12v dc .