Robot adalah alat mekanikal pintar dan robot pertama dibuat oleh 'Czech Playwright Carel Capek' pada tahun 1920. Robotik adalah cabang kejuruteraan yang berkaitan dengan merancang, membuat, dan operasi. Kata robotik berasal dari istilah robot. Pada masa ini, terdapat beberapa jenis robot yang tersedia seperti jenis siri, jenis selari, jenis berjalan, dan robot jenis mudah alih. Bahagian robotik terutamanya terdiri daripada bekalan kuasa, pengawal, gripper, manipulator, dan efektor akhir. Apabila kita berfikir tentang robot, faktor utama yang melanda fikiran kita adalah meniru seseorang. Namun, secara nyata, tidak ada definisi sebenar robot. Tetapi, ada beberapa ciri asas yang harus dimiliki robot seperti kecerdasan, penginderaan, tenaga, dan pergerakan, dll. Beberapa robot bekerja sendiri untuk melakukan tugas-tugas tertentu. Tetapi, robot alternatif memerlukan pertolongan dari manusia. Akibatnya, robot ini bergantung. Idea Projek Robotik digunakan sepenuhnya dalam aplikasi yang berbeza seperti perubatan, komunikasi ruang angkasa, dan aplikasi ketenteraan
Idea Projek Robotik Terkini untuk Pelajar Kejuruteraan
Pada masa ini, beberapa pelajar kejuruteraan menunjukkan minat yang tinggi terhadap projek robotik. Mereka menimbulkan banyak minat berbanding yang lain projek elektronik . Di peringkat pendidikan, projek-projek robotik ini sangat popular, ia adalah robot mengikuti, memilih dan meletakkan robot, memadam kebakaran, trek dinding, humanoid, dan Hexapod, dll. Idea Projek Robotik ini untuk pelajar kejuruteraan akan membantu semasa melakukan latihan . Oleh itu, kami cenderung untuk menasihati pelajar kejuruteraan untuk memilih dari ini kit robotik kerana ini mampu beroperasi untuk mereka.

Idea projek berasaskan robotik
Robot Pengintipan Medan Perang menggunakan Kamera Tanpa Wayar Night Vision
Tujuan utama projek ini untuk merancang kenderaan robot menggunakan teknologi RF dan kamera tanpa wayar, di mana teknologi RF digunakan untuk operasi jarak jauh dan kamera tanpa wayar digunakan untuk tujuan pemantauan. Robot bersama dengan kamera dapat menghantar video dengan kemampuan penglihatan malam. Robot jenis ini sangat berguna di medan perang untuk tujuan mengintip. Seorang 8051 mikrokontroler digunakan untuk operasi yang diinginkan.

Robot Pengintipan Medan Perang dengan Kamera Tanpa Wayar Night Vision
Projek ini menggunakan kamera penglihatan malam untuk menangkap gambar walaupun di tempat yang gelap dan menghantar tanpa wayar ke unit penerima TV. Robot ini digunakan dalam aplikasi ketenteraan seperti menghantar maklumat ke unit kawalan dan mengintip tanah musuh. Robot ini adalah dikawal dengan menggunakan komunikasi RF dengan satu set butang tekan.
Selanjutnya, projek ini dapat dirancang dengan menggunakan Teknologi DTMF . Dengan menggunakan teknologi ini kita dapat mengawal kenderaan robot dengan menggunakan telefon bimbit. Jika dibandingkan dengan teknologi RF, teknologi ini mempunyai kelebihan berbanding jarak komunikasi yang panjang.
Kereta Api Metro Auto yang bergerak antara Dua Stesen
Matlamat utama projek ini adalah untuk menunjukkan teknologi, yang digunakan dalam pergerakan kereta api metro. Projek ini digunakan di banyak negara maju. Kereta api metro dilengkapi dengan alat kawalan, yang membolehkan perjalanan kereta api secara automatik dari satu stesen ke stesen yang lain.

Kereta Api Metro Auto untuk ulang-alik antara Stesen
Ini projek kereta api metro automatik direka dengan mekanisme mula dan berhenti automatik. Sehingga kereta api metro berhenti pada waktu tertentu dan bermula selepas waktu tertentu. Ini terdiri daripada mekanisme automatik untuk membuka dan menutup pintu dan ia mengira jumlah orang semasa memasuki kereta api.
Track Sensing Pergerakan Kenderaan Robotik
Tujuan utama projek ini adalah untuk merancang robot, yang mengesan jalan tertentu. Jalannya boleh menjadi jalur hitam di lantai putih. Kenderaan robotik pengesan trek digunakan dalam pelbagai aplikasi dari menjadi panduan di tempat awam untuk kenderaan automatik. Di sini, kenderaan robot ini direka oleh sepasang sensor yang dibuat untuk bergerak pada jalur hitam melengkung yang dirasakan untuk kedua-dua motor.

Track Sensing Pergerakan Kenderaan Robotik
Kenderaan robot pengesan trek ini terdiri daripada dua motor, bekalan DC. Kedua-dua motor ini dikendalikan oleh transistor, yang berfungsi sebagai suis. Dua sensor, masing-masing sensor termasuk LED IR dan fotodioda diletakkan di bawah litar. Apabila kedua-dua sensor merasakan lantai putih, maka motor memberikan putaran dengan sewajarnya.
Pada belokan, ketika menemui jalan hitam, salah satu motor berhenti berputar dengan input sensor. Prinsip kerja sensor adalah, apabila LED IR menghasilkan cahaya di lantai putih, maka ia akan dipantulkan. Apabila cahaya yang dipantulkan turun pada fotodioda, ia akan mengurangkan daya tahannya untuk mengawal pengalihan suis motor.
Kenderaan Robotik Pengesan Logam
Objektif utama projek ini adalah merancang kenderaan robot untuk mengesan logam dan ranjau darat. Ranjau darat adalah alat yang tidak stabil yang terletak di bawah tanah dan berbahaya untuk mengesannya menggunakan pengesan logam secara manual. Dalam projek ini, alat pengesan logam tertanam dalam robot dan dikendalikan dengan menggunakan komunikasi RF.

Idea Projek Robotik Pengesan Logam
Di hujung pemancar, bilangan butang tekan adalah dihubungkan ke mikrokontrol r untuk menjalankan robot dalam gerakan tertentu. Apabila butang ditekan, maka isyarat dihantar ke mikrokontroler yang menghantar data binari ke butang. Pengekod digunakan untuk menukar data selari menjadi data bersiri dan arahan ini dihantar menggunakan modul RF.
Di hujung penerima, isyarat ini disahkod oleh penyahkod. Berdasarkan isyarat, mikrokontroler memberikan isyarat yang berkaitan kepada pemandu motor untuk menggerakkan motor. Supaya robot bergerak dalam gerakan yang diinginkan. Pengesan logam tertanam di litar robot yang mengesan logam dan memberi petunjuk dengan menggunakan buzzer.
Kenderaan Robotik RF Terkawal dengan Susunan Rasuk Laser
Projek ini dirancang untuk mengawal kenderaan robot dengan menggunakan teknologi RF. Lampu laser berkuasa rendah dihubungkan untuk menunjukkan kemungkinan mengakhiri objek jauh dengan pancarannya. Mikrokontroler 8051 digunakan untuk operasi yang diinginkan.

Kenderaan Robotik RF Terkawal dengan Susunan Rasuk Laser
Pada hujung pemancar, tombol tekan digunakan untuk menghantar arahan kepada penerima untuk mengawal pergerakan robot sama ada untuk bergerak ke kanan, kiri ke depan, atau ke belakang. Pada hujung penerima, dua motor dihubungkan ke mikrokontroler di mana mereka digunakan untuk pergerakan kenderaan.
Pemancar RF berfungsi sebagai alat kawalan jauh RF yang mempunyai kelebihan jarak yang cukup (hingga 200 meter) dengan antena yang tepat, sementara penerima menyahkod sebelum memasangkannya ke mikrokontroler lain untuk menggerakkan motor DC melalui IC pemandu motor untuk pekerjaan yang diperlukan.
Pena laser dipasang di badan robot dan operasinya dilakukan dari output mikrokontroler melalui isyarat yang sesuai dari hujung pemancar. Lampu laser yang digunakan hanya untuk tujuan demonstrasi dan bukan yang kuat.
Selanjutnya, projek ini dapat dipertingkatkan dengan menggunakan Teknologi DTMF . Dengan menggunakan teknologi ini kita dapat mengawal kenderaan robot dengan menggunakan telefon bimbit. Teknologi ini mempunyai kelebihan berbanding jarak komunikasi yang panjang berbanding dengan teknologi RF.
Talian Mengikuti Kenderaan Robotik
A-Line Follow Robot adalah robot yang mengikuti jalan tertentu di mana ia bergerak. Jalan itu boleh menjadi jalan hitam di lantai putih atau medan magnet. Robot ini digunakan dalam pelbagai aplikasi dari menjadi panduan di tempat awam hingga kenderaan automatik. Di sini kenderaan robot Line Line dibangunkan yang dibuat untuk bergerak di jalur hitam melengkung yang dirasakan oleh sepasang sensor untuk setiap motor. Di sini kenderaan robot terdiri daripada dua motor dan bekalan DC ke setiap motor dikawal menggunakan transistor yang bertindak sebagai suis.

Garis Mengikut Idea Projek Robotik
Sepasang sensor masing-masing terdiri daripada LED IR dan fotodioda diletakkan di bawah litar. Lantai putih dirasakan oleh sensor dan motor diberi putaran dengan sewajarnya. Pada belokan, ketika menemui jalan hitam, salah satu motor berhenti berputar dengan input sensor. Sensor berfungsi berdasarkan prinsip bahawa apabila cahaya dari LED IR jatuh pada permukaan putih, ia akan dipantulkan dan cahaya yang dipantulkan ini ketika jatuh pada fotodioda, mengurangkan ketahanannya sehingga dapat mengawal pengaliran suis motor.
Kenderaan Robotik Penghindaran Halangan
Robot boleh dikawal dengan mengesan persekitaran sendiri atau menggunakan alat kawalan jauh atau cara lain secara manual. Di sini robot automatik sepenuhnya dikembangkan yang merasakan kawasan di sekelilingnya dan dengan itu bergerak. Susunan sensor terpasang yang merasakan objek di hadapannya dan dengan itu robot mengubah arahnya untuk mengelakkan perlanggaran. Kenderaan robotik seperti itu boleh digunakan di tempat-tempat seperti tempat perlindungan dll.

Kenderaan Robotik Penghindaran Halangan
Sensor ultrasonik digunakan untuk mengesan kehadiran halangan. Sensor ini berfungsi berdasarkan prinsip pantulan gelombang ultrasonik oleh objek yang diterima oleh sensor dan ditukar kepada isyarat elektrik. Apabila menerima isyarat gangguan, mikrokontroler memberikan perintah yang tepat kepada pemandu motor sehingga salah satu motor dihentikan dan motor lain berputar, memberikan perubahan arah ke robot.
Pilih Kenderaan Robot Tempat N dengan Pencengkam Lembut
Kenderaan robot boleh digunakan untuk mengambil objek dan meletakkannya dengan sewajarnya. Untuk tujuan ini, robot terdiri daripada efektor akhir yang momennya dikendalikan dengan menggunakan motor. Kenderaan robotik dikendalikan dari jarak jauh dengan sekumpulan butang menggunakan komunikasi RF.

Pilih dan Letakkan Robot
Di sisi pemancar, papan kekunci dihubungkan dengan mikrokontroler dan apabila kekunci yang relevan ditekan, mikrokontroler menghasilkan kod binari untuk kunci itu, dan kod binari ini ditukar menjadi bentuk siri dan dihantar melalui modul RF dan antena RF.
Pada penerima, dua motor digunakan untuk memberikan gerakan yang relevan kepada kenderaan robot dan dua motor lain digunakan untuk mengawal pergerakan gripper untuk menahan objek apa pun dan meletakkannya di tempat yang diinginkan. Perintah yang dihantar dari pemancar didekodekan dan digunakan oleh mikrokontroler untuk memberikan isyarat yang tepat kepada IC pemandu motor.
Kenderaan Robot Memadam Kebakaran
Robot boleh digunakan dalam banyak situasi berbahaya seperti ketika kemalangan kebakaran berlaku. Berikut adalah prototaip seperti demonstrasi yang terdiri daripada paip air dengan muncung dan pam. Pergerakan robot, serta penyemburan air melalui muncung, dikendalikan dari jarak jauh menggunakan satu set tombol tekan dan perintahnya dikirimkan robot melalui komunikasi RF.

Projek Kenderaan Robot Pemadam Kebakaran Berasaskan RF
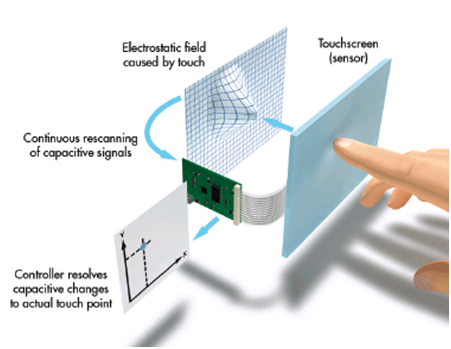
Kenderaan Robotik Kawalan Jauh Berasaskan Skrin Sentuh untuk Pengurusan Stor
Di sini robot pick and place dikembangkan yang dikendalikan menggunakan komunikasi RF. Panel layar sentuh digunakan untuk memberikan perintah yang dikirim dan diterima oleh robot untuk memberikan gerakan yang tepat kepada robot ke arah yang diinginkan dan mengendalikan operasi memilih dan meletakkan.
Robot Sensing Warna dengan MATLAB
Projek ini mengimplementasikan kenderaan robot untuk mengesan warna gambar yang diambil menggunakan MATLAB. Projek ini sangat membantu dalam mengurangkan usaha manusia sambil mengesan warna dalam gambar. Projek ini dapat dilaksanakan dengan menggunakan teknik pemprosesan gambar berdasarkan MATLAB. Robot ini mempunyai beberapa ciri menggunakan MATLAB seperti mengesan warna, usaha manusia dapat dikurangkan, efisien, dan menjimatkan masa.
Kereta Robot Dikawal Telefon Pintar berasaskan Arduino
Projek ini digunakan untuk membina sebuah kereta robot yang dikendalikan oleh telefon pintar berasaskan Arduino. Robot yang dikendalikan telefon android ini mengawal robot menggunakan teknologi Bluetooth. Komponen utama yang digunakan dalam projek ini adalah kereta robot, Arduino Uno, Android Phone, dan Bluetooth Module. Untuk itu, pengguna telefon bimbit android harus memuat turun dan memasang aplikasi di telefon bimbit mereka, dan kemudian pengguna mudah alih harus mematikan pilihan Bluetooth di telefon bimbit.
Di sini Bluetooth adalah teknik komunikasi tanpa wayar yang memainkan peranan penting dalam mengawal robot. Di sini, telefon android menghasilkan arahan ke Bluetooth yang disambungkan dengan robot. Perintah bergerak ke kanan, kiri, ke depan & belakang. Penerima Bluetooth ini mendapat arahan dan menghantarnya ke pengawal mikro untuk menguruskan motor. Selepas itu, mikrokontroler ini menghantar isyarat ke IC pemandu motor untuk mengaktifkan motor.
Projek Robotik menggunakan Arduino
Senarai Idea Projek Robotik Arduino dibincangkan di bawah.

Idea Projek Robotik Arduino
Robot Mesin Rumput Dikendalikan melalui Arduino
Projek ini merancang robot yang digunakan untuk memotong rumput di kawasan kebun yang ditentukan dengan mengelakkan halangan. Robot ini boleh dikendalikan melalui tenaga suria menggunakan alat kawalan Arduino seperti alat kawalan pusat.
Robot Perahu Pintar menggunakan Arduino Board
Projek robot sederhana ini direka dengan papan Arduino untuk membuat babi hutan untuk mengesan halangan, kawalan cahaya, dll.
Robot untuk Mencari Cahaya menggunakan Arduino
Projek ini digunakan untuk merancang robot berikut cahaya. Pengendalian projek ini dapat dilakukan dengan menggunakan cahaya tanpa gangguan robot. Oleh itu, projek seperti ini juga disebut sebagai robot ringan. Projek ini dapat dirancang dengan papan Arduino termasuk kemampuan pengesanan halangan.
Robot Bajak Salji
Projek ini digunakan untuk merancang robot snowplow dengan Arduino Uno. Robot ini berfungsi dengan menggunakan perintah yang dihantar dari peranti frekuensi radio. Peranti ini digunakan untuk mengawal pergerakan robot & bajak dengan cara yang diperlukan.
Robot Mengimbangkan Diri
Objektif utama projek ini adalah merancang robot pengimbang termasuk dua roda. Projek ini boleh dibina dengan Arduino untuk kawalan digital yang berasingan untuk mendapatkan kestabilan.
Robot Berempat
Projek ini digunakan untuk merancang robot berkaki empat. Ia adalah robot berkembar yang sederhana dan menjimatkan kos termasuk dua servo yang dikendalikan melalui pengawal Arduino Uno.
Robot Manipulator menggunakan Arduino
Projek ini menggunakan lengan robot yang mempunyai fungsi yang serupa dengan lengan manusia. Fungsi-fungsi ini dapat dicapai dengan program yang terdapat di lengan. Perancangan manipulator robot boleh dilakukan dengan menggunakan alat kawalan Arduino.
Robot Omni Wheels
Projek ini menggunakan robot roda Omni. Robot ini sangat mudah untuk mereka bentuk dan dipasang. Robot jenis ini membenarkan jenis tindakan baru. Pelaksanaan robot ini dapat dilakukan dengan menggunakan papan Arduino melalui litar pemandu motor.
Pembersih Vakum Robotik menggunakan Arduino
Projek ini merancang robot pembersih vakum autonomi. Robot ini digunakan untuk membersihkan rumah tanpa gangguan manusia melalui sensor, pengawal Arduino & litar pemandu motor.
Idea Robot untuk Masa Depan
Dalam kehidupan seharian kita, robot digunakan untuk beberapa tujuan di pelbagai cabang. Antaranya, robot yang digunakan dalam kehidupan seharian disenaraikan di bawah. Senarai idea projek robotik dalam projek sains kehidupan seharian adalah
- Robot memandu sendiri
- Robot untuk Memerangi Jenayah
- Robot dalam Pertahanan, Keselamatan & Pengawasan
- Robot dalam Bidang Pendidikan
- Robot seperti Hamba
- Robot Memasak
- Robot dalam Bidang Perubatan
- Robot untuk Melakukan Pekerjaan Berbahaya
- Robot untuk Penyelenggaraan Rumah
Idea Projek Lengan Robotik
Idea Projek Robotik berikut berdasarkan projek lengan robot menggunakan Arduino untuk pelajar kejuruteraan.

Idea Projek Robotik berdasarkan Arm
Lengan Robotik Dikawal melalui Sarung Tangan Tanpa Wayar
Projek ini menerapkan sistem untuk mengawal tangan robot menggunakan sarung tangan tanpa wayar. Projek ini boleh dirancang dengan Arduino Nano, bateri, modul transceiver, servo motor & sensor yang berkaitan.
Lengan Robotik Dikawal melalui Nunchuck
Projek ini memberitahu anda cara memprogram serta memasang lengan robot dengan bantuan Arduino Mega. Projek ini berbeza dengan projek berasaskan lengan yang lain kerana menggunakan Nintendo Nunchuk untuk mengawal lengan robot. Sangat mudah dicari, murah & termasuk sekumpulan sensor.
Lengan Robotik Dikawal melalui Gerakan
Projek ini merancang robot yang dapat dikendalikan melalui gerakan tangan. Di sini, sensor kinetik digunakan untuk menangkap gerak isyarat. Perkembangan lengan robot dapat dilakukan melalui motor servo yang meniru bahu lengan kanan & pergerakan tangan.
Lengan Robotik Dikendalikan Tetikus Komputer
Projek ini digunakan untuk merancang lengan robot dan lengan ini dapat dikendalikan melalui tetikus komputer. Projek ini juga digunakan untuk memproses gambar dengan membuat keputusan sendiri dengan menggunakan MATLAB.
Lengan Robotik Dikendalikan Aplikasi Android
Projek ini dilaksanakan terutamanya untuk mengendalikan lengan robot dengan bantuan modul Arduino & Bluetooth menggunakan aplikasi android. Komponen yang diperlukan dalam projek ini adalah motor DC, Arduino mega, dan modul Bluetooth (HC-05).
Berikut adalah beberapa yang menarik Idea Projek Robotik dengan Abstrak untuk pelajar tahun akhir kejuruteraan. Anda boleh mendapatkan perincian gambarajah blok mengenai Idea Projek Robotik berikut bersama dengan abstrak dengan mengklik pada pautan 'abstrak'.
- Kenderaan Robotik RF Terkawal dengan Susunan Rasuk Laser - Abstrak .
- Laluan Mengikuti Kenderaan Robotik - Abstrak .
- Pilih & Tempatkan Dengan Gripper Soft Catching - Abstrak .
- Kenderaan Robot Memadam Kebakaran menggunakan Mikrokontroler– Abstrak .
- Robot terkawal RF dengan Kamera Tanpa Wayar Night Vision untuk Mengintip di Medan Perang - Abstrak .
- Garis Berasaskan Pengawal Mikro Mengikuti Kenderaan Robotik- Abstrak .
- Kenderaan Robotik Penghindaran Halangan menggunakan Sensor Ultrasonik - Abstrak .
- Kereta Api Metro Auto untuk ulang-alik antara Stesen - Abstrak .
- Kenderaan Robotik Terkawal IR - Abstrak .
- Kenderaan Robotik Dikendalikan Telefon Bimbit - Abstrak .
- Kenderaan Robotik Pengesan Logam - Abstrak .
- Kenderaan Robotik Dikawal Suara dengan Pengiktirafan Pertuturan Jarak Jauh - Abstrak
- Robot Pemadam Api Dikendalikan Dari Jauh dari Android - Abstrak
- Kenderaan Robotik Terkawal IR - Abstrak
Projek Mini mengenai Robotik
Idea projek robotik mini merangkumi yang berikut. Idea Projek Robotik ini sangat membantu untuk pemula dan juga pelajar diploma dalam bidang kejuruteraan.

Idea Projek Robotik Ringkas
Robot untuk Pengesanan Bom
Robot ini digunakan untuk mengesan bom di tempat masing-masing. Robot ini boleh dikendalikan oleh orang tersebut melalui RF tanpa wayar menggunakan PC. Sebaik sahaja robot mengesan bom maka ia menghasilkan bunyi bel dan akan ada perubahan bahan yang merosakkan dalam bom yang boleh menyebabkan kerosakan teruk di sekitarnya. Untuk itu, litar pengesan logam dimasukkan ke dalam sistem yang dicadangkan.
Lengan Robotik Dikawal melalui Jauh
Projek ini menggunakan lengan robot yang mengawal melalui alat kawalan jauh. Robot ini mengurangkan usaha manusia dalam pelbagai industri dengan mengurangkan masa. Robot ini digunakan untuk tugas tertentu yang dikendalikan melalui alat kawalan jauh. Di sini, robot ini diprogramkan untuk tugas tertentu. Projek ini menggunakan alat kawalan jauh untuk mengawal lengan robot. Sinyal inframerah yang diterima dari pemancar dapat dikesan melalui penerima IR menggunakan dioda foto asas.
Fotografi Arial Tidak Berawak GSM Menggunakan Robot Terbang Jauh
Projek ini digunakan untuk menangkap gambar manusia & mengirimkannya ke komputer peribadi melalui audio dan video tanpa wayar untuk pertahanan. Sistem ini merancang sistem yang ringan dan sesuai untuk operasi pengawasan menggunakan sensor.
Sensor mesti kekal tinggi sekurang-kurangnya dua minit pada ketinggian minimum 30 meter untuk pengimejan kawasan seimbang di bawah.
Maklumat video yang dikenali mesti dihantar ke titik penerima di tanah yang terletak dengan betul di kawasan pemerhatian. Sensor yang digunakan mesti dapat melihat objek dalam keadaan yang disebutkan di atas. Konfigurasi sistem ini merangkumi sensor, pemerhatian, pautan data, mekanisme pemprosesan data & sistem sokongan.
Navigasi Robot dengan Odometri Optik
Projek ini merancang robot untuk navigasi menggunakan Optical Odometry. Masalah utama yang dihadapi oleh robot mudah alih autonomi adalah kemampuan mereka untuk mencari jalan dengan selamat & konsisten di persekitarannya.
Robot Tanker Tanpa Wayar Tanpa Wayar
Projek ini merancang sistem kawalan yang digunakan untuk kenderaan robot sehingga dapat dikendalikan melalui RF dan PC. Dalam sistem yang dicadangkan ini, pengendalian robot dapat dilakukan berdasarkan maklum balas yang diberikan dari sensor inframerah. Sensor ini adalah bahagian penting dari rangkaian pengesanan objek.
Robot Berkumpulan
Robot ini berfungsi dengan Artificial Swarm Intelligence yang menggunakan beberapa robot. Robot ini berkoordinasi antara satu sama lain untuk menyelesaikan tugas. Komunikasi robot ini boleh dilakukan tanpa wayar & berjalan sesuai. Dalam projek ini, dua robot dirancang seperti master os dan yang lain adalah hamba tetapi komunikasi antara kedua robot ini dapat dilakukan tanpa wayar antara satu sama lain. Di sini, robot induk digunakan untuk mengawal robot hamba semasa menjalankan misinya sedangkan robot salve berfungsi bergantung pada isyarat yang diterima dari robot induk.
Membersihkan Robot
Projek ini merancang robot iaitu robot pembersih untuk menjaga kebersihan dan kilauan rumah. Dengan menggunakan robot ini, pembersihan lantai, dan dinding di rumah dapat dilakukan dengan mudah menggunakan Smartphone dengan menekan butang.
Idea Projek Robotik untuk Pelajar Diploma dan Kejuruteraan
Dalam bidang robotik, penting untuk menangani reka bentuk, operasi, pembinaan, pelupusan struktur, pembuatan, dan penggunaan robot. Dengan menggunakan teknologi komputer, seseorang dapat mengerjakan kawalan, maklum balas deria, dan pemprosesan maklumat menggunakan perkakasan dan sensor yang sesuai. Banyak motor digunakan dalam robotik yang dikendalikan melalui pengawal mikro khusus dengan program yang sesuai. Oleh itu, pengetahuan bahasa dalam pemasangan dan ‘C’ adalah mustahak untuk merancang aplikasi robot.
Pada masa kini banyak pelajar kejuruteraan menunjukkan minat yang tinggi terhadap projek robotik dan mereka menimbulkan banyak minat berbanding yang lain. Robot seperti mengikuti baris, memilih tempat, memadam kebakaran, trek dinding, hexapod, humanoid, dan lain-lain adalah beberapa projek popular di peringkat akademik.
Idea projek Robotik terkini untuk pelajar kejuruteraan tahun akhir telah disenaraikan di sini.
- Kenderaan Robotik Sensor Halangan Ultrasonik
- Pergerakan Kenderaan Robotik Dengan Telefon Bimbit
- Kenderaan Robotik Dikendalikan oleh Alat Jauh TV
- Robot Terkawal Accelerometer (Giroskop)
- Robot Tanpa Wayar Terkawal Frekuensi Radio (RF)
- Robot yang dikendalikan oleh suara dengan teknologi pengenalan pembesar suara
- Robot Pic dan Tempat yang dikendalikan oleh komputer (berwayar atau tanpa wayar)
- Bot yang dikendalikan oleh Zigbee dengan penghantaran video dan suara tanpa wayar dengan kemampuan penglihatan malam
- Robot Autonomi dengan penglihatan buatan untuk pengesanan halangan
- Robot pengesanan Gas Asap dan LPG dengan kawalan tanpa wayar
- Robot pengikut cahaya yang kelihatan
- Robot Bluetooth terkawal telefon bimbit Android
- Robot pengintipan medan perang yang dikendalikan tanpa wayar dengan kamera tanpa wayar malam
- Pembinaan Quad Rotor Chopper terbang dengan sistem pengawasan kamera video
- Robot navigasi kendiri berasaskan Kompas Digital dan GPS
- Robot pengesanan bom
- Kawalan bot robotik tanpa manusia yang berasaskan DTMF untuk aplikasi penyelidikan lautan
- Robot wifi dikawal dari telefon bimbit pintar Android
- Robot penyembur penyegar bilik tanpa wayar dengan penglihatan video
- Robot terkawal telefon bimbit berasaskan DTMF
- terbang helikopter Quad robot dengan kamera video tanpa wayar
- Robot navigasi kendiri berasaskan GPS dan Digital Compassed
- Robot menggantikan bom dengan kamera video tanpa wayar yang dikawal dari PC / Laptop
- Robot Pintar Dikawal Telefon bimbit GSM (SMS)
- Robot penghantaran suara dan gambar tanpa wayar untuk sistem pengawasan
- Robot penjejakan cahaya inframerah (Alat kawalan jauh TV)
- Robot pengesanan dan amaran Manusia secara langsung
- Mikro Elektro Mekanik Sensor (MEMS) Accelerometer / Gyroscope self-balancing robot
- Robot yang dikendalikan oleh Bluetooth telefon bimbit
- Telefon bimbit dikendalikan robot berjalan berkaki empat dengan kawalan kelajuan dan arah
- Robot pengesanan halangan dengan suis penginderaan mekanikal
- Robot pengesanan halangan dengan Sensor Ultrasonik
- Robot Berwayar Berkawal PC
- Land Rover medan perang yang dikendalikan tanpa wayar yang memberi amaran tentang penginderaan Tambang Darat yang ditanam
- Antara muka robot manusia menggunakan pengecaman pertuturan yang mantap
- Robot Serbaguna tanpa wayar yang dikendalikan oleh PC
- Robot pemadam api yang dikendalikan tanpa wayar dengan semburan jet air
- Land Rover Terkawal Jauh
- Kamera Penstriman Audio-Video Tanpa Wayar yang Dikawal oleh Robot
- Sistem kawalan kamera video tanpa wayar servo bermotor
- Robot Pengikut Dinding
- sistem lif tanpa wayar terkawal pertuturan
- Robot pengecaman pertuturan dengan sistem penghindaran halangan ultrasonik
- Robot pintar terkawal Skrin Sentuh
- Kenderaan pemadam api pintar yang dikendalikan oleh suara
Dapatkan lebih banyak maklumat mengenai pelbagai Projek Robotik berasaskan mikrokontroler untuk Pelajar Kejuruteraan .
Oleh itu, ini adalah mengenai senarai Idea Projek Robotik untuk pelajar diploma dan kejuruteraan dalam pelbagai bidang seperti idea projek Arduino, Mini, Arm, idea untuk masa depan, dan lain-lain. Ini adalah Idea Projek Robotik terkini yang menarik yang bertujuan untuk pelajar tahun akhir kejuruteraan . Di dalam tahap akademik robotik projek menggunakan mikrokontroler atau kit robot sangat terkenal. Oleh itu, projek robot ini akan sangat membantu pelajar. Selain daripada ini, sebarang pertanyaan mengenai projek-projek ini atau projek robotik sederhana untuk pemula anda boleh memberikan cadangan berharga anda dengan memberi komen di bahagian komen di bawah.