Pengenalan ringkas mengenai robot:
Robot adalah mana-mana mesin yang sepenuhnya automatik, iaitu bermula dengan sendirinya, memutuskan cara kerjanya sendiri dan berhenti sendiri. Ini sebenarnya adalah replika manusia, yang telah dirancang untuk meringankan beban manusia. Ia boleh dikawal secara pneumatik atau menggunakan kaedah hidraulik atau menggunakan kaedah kawalan elektronik yang mudah. Robot perindustrian pertama adalah Unimates yang dibina oleh George Devol dan Joe Engelberger pada akhir 50-an dan awal 60-an.
Mana-mana robot dibina berdasarkan 3 undang-undang asas yang ditentukan oleh pengarang fiksyen Sains Rusia, Isaac Asimov:
- Robot tidak boleh membahayakan manusia secara langsung atau tidak langsung.
- Robot harus mematuhi perintah manusia kecuali dan sehingga melanggar undang-undang pertama.
- Robot harus melindungi keberadaannya dengan syarat kedua undang-undang pertama tidak dilanggar.

Robot Tetap
Robot boleh menjadi robot tetap atau robot mudah alih. Robot Mudah Alih adalah robot dengan pangkalan bergerak yang menjadikan robot bergerak bebas di persekitaran. Salah satu robot mudah alih canggih adalah Line Follower Robot. Pada dasarnya ia adalah robot yang mengikuti jalan atau lintasan tertentu dan memutuskan tindakannya sendiri yang berinteraksi dengan halangan. Laluan boleh berupa garis hitam di lantai putih (kelihatan) atau medan magnet (tidak kelihatan). Aplikasinya bermula dari penggunaan domestik asas hingga kegunaan industri, dan lain-lain. Keadaan semasa dalam industri ialah mereka membawa bungkusan atau bahan satu tempat ke tempat lain menggunakan sistem kren. Kadang-kadang mengangkat berat yang besar pada masa itu boleh menyebabkan kerosakan bahan pengangkut dan juga akan menyebabkan kerosakan pada bungkusan. Garis berikut robot biasanya digunakan untuk membawa anak-anak melalui pusat membeli-belah, rumah, tempat hiburan, industri. Penggunaan garis berikut kenderaan robotik adalah mengangkut bahan dari satu tempat ke tempat lain di industri. Pergerakan robot ini bergantung sepenuhnya pada trek. Robot boleh melakukan apa sahaja yang anda tetapkan untuk mereka lakukan. Seperti di kilang yang ada kaitannya dengan membuat produk mereka adalah membuat robot.

Robot mudah alih
Robot pengikut garis
Robot pengikut garis adalah robot yang mengikuti jalan tertentu yang dikendalikan oleh mekanisme umpan balik.
Membina robot pengikut garis asas:
Membina Robot Pengikut Line asas melibatkan langkah-langkah berikut.
- Merancang bahagian mekanikal atau badan robot
- Mendefinisikan kinematik robot
- Merancang kawalan robot

Robot Pengikut Talian
Bahagian atau badan mekanikal robot boleh dirancang menggunakan AutoCAD atau Workspace. Robot pengikut Line asas boleh terdiri dari pangkalan di dua hujung roda yang dipasang. Lembaran segi empat tepat dari plastik keras boleh digunakan sebagai alas. Selanjutnya badan yang kaku seperti silinder dapat ditambahkan bersama dengan badan berbentuk lain yang saling terhubung satu sama lain oleh sendi, dan masing-masing dengan gerakan yang ditentukan pada arah tertentu. Robot pengikut Line boleh menjadi robot bergerak beroda dengan pangkalan tetap, robot bergerak berkaki dengan pelbagai badan kaku yang saling berkaitan dengan sendi.
Langkah seterusnya melibatkan menentukan Kinematik robot. Analisis kinetik robot melibatkan perihalan pergerakannya berkenaan dengan sistem koordinat tetap. Ini terutama berkaitan dengan pergerakan robot dan pergerakan setiap badan jika ada robot berkaki. Secara amnya melibatkan dinamika pergerakan robot. Keseluruhan lintasan robot diatur menggunakan analisis Kinematic. Ini boleh dilakukan dengan menggunakan perisian Workspace.
Kawalan robot adalah aspek terpenting dalam kerjanya. Di sini istilah kawalan merujuk kepada kawalan gerakan robot, iaitu mengawal pergerakan roda. Robot pengikut garis asas mengikuti jalan tertentu dan pergerakan robot di sepanjang jalan ini dikendalikan dengan mengawal putaran roda, yang diletakkan di atas poros kedua motor. Jadi, kawalan asas dicapai dengan mengawal motor. Litar kawalan melibatkan penggunaan sensor untuk merasakan jalan dan pengawal mikro atau alat lain untuk mengawal operasi motor melalui pemandu motor, berdasarkan output sensor.
2 Cara mengawal Follower Robot talian
- Tanpa menggunakan Mikrokontroler

Blok Diagram Sistem kawalan
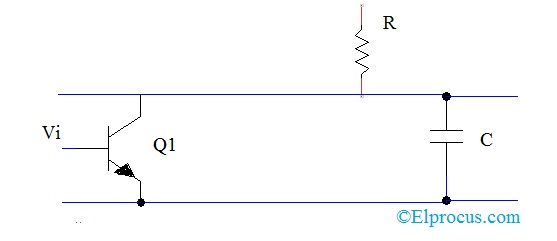
Ia terdiri daripada susunan IR-LED dan Photodiode untuk setiap motor yang dikendalikan dengan menghidupkan dan mematikan transistor.
LED IR apabila mendapat bias yang tepat memancarkan cahaya Infra merah. Lampu IR ini dipantulkan sekiranya permukaan berwarna putih dan cahaya IR yang dipantulkan terjadi pada fotodioda. Rintangan fotodiod menurun, yang menyebabkan peningkatan arus melaluinya dan dengan itu voltan jatuh melintasi. Fotodiod disambungkan ke pangkal transistor dan sebagai hasil daripada peningkatan voltan merentasi fotodioda, transistor mula melakukan dan dengan itu motor yang disambungkan ke pemungut transistor mendapat bekalan yang cukup untuk mula berputar. Sekiranya terdapat warna hitam di jalan yang dihadapi oleh salah satu susunan sensor, cahaya IR tidak dipantulkan dan fotodioda menawarkan lebih banyak rintangan, menyebabkan transistor berhenti melakukan pengaliran dan akhirnya motor berhenti berputar.
Oleh itu, keseluruhan sistem dapat dikendalikan dengan menggunakan susunan LED-Photodiode-Transistor yang ringkas.
- Dengan menggunakan Mikrokontroler
Prinsip kerja:
Robot fallow line adalah salah satu robot yang beroperasi sendiri. Itu mengesan dan jatuh garis yang dilukis di kawasan itu. Garis ditunjukkan oleh garis putih di permukaan blok atau garis blok di permukaan putih. Sistem ini mesti masuk akal mengikut garis. Aplikasi ini bergantung pada sensor. Di sini kita menggunakan dua sensor untuk tujuan pengesanan jalur. Itu adalah sensor jarak dan sensor IR. Sensor jarak yang digunakan untuk pengesanan jalur dan sensor IR yang digunakan untuk pengesanan halangan. Sensor ini dipasang di hujung depan robot. Mikrokontroler adalah peranti pintar yang keseluruhan litar dikendalikan oleh mikrokontroler.

Blok Diagram Garisan Mengikuti Kenderaan Robotik dengan Mikrokontroler
Pelbagai jenis kenderaan robotik kawalan talian:
Terdapat dua jenis kenderaan robotik terkawal talian
- Kenderaan robotik talian kawalan mudah alih
- Kenderaan robotik talian berasaskan RF
Aplikasi robot pengikut baris:
- Aplikasi Industri : Robot ini dapat digunakan sebagai pembawa peralatan automatik dalam industri menggantikan tali sawat tradisional.
- Aplikasi kenderaan : Robot ini juga boleh digunakan sebagai kereta automatik berjalan di jalan raya dengan magnet tertanam.
- Aplikasi domestik : Ini juga boleh digunakan di rumah untuk keperluan domestik seperti pembersihan lantai dll.
- Aplikasi bimbingan : Ini boleh digunakan di tempat awam seperti pusat membeli-belah, muzium dan lain-lain untuk memberikan panduan jalan.
Kelebihan:
- Pergerakan robot adalah automatik
- Ia digunakan untuk aplikasi jarak jauh
- Kesederhanaan bangunan
- Sistem muat dan lupakan
- Digunakan di rumah, automasi industri dll.