
Pengenalan:
Kini banyak industri menggunakan robot kerana tahap prestasi dan kebolehpercayaannya yang tinggi dan yang sangat membantu manusia. Robotik penghindaran halangan digunakan untuk mengesan rintangan dan mengelakkan perlanggaran. Ini adalah robot autonomi. Reka bentuk robot penghindar halangan memerlukan penyatuan banyak sensor mengikut tugas mereka.
Pengesanan halangan adalah keperluan utama robot autonomi ini. Robot mendapat maklumat dari kawasan sekitarnya melalui sensor yang dipasang pada robot. Beberapa alat penginderaan yang digunakan untuk pengesanan rintangan seperti sensor bump, sensor inframerah, sensor ultrasonik, dll. Sensor ultrasonik paling sesuai untuk pengesanan halangan dan berharga rendah dan memiliki kemampuan jangkauan tinggi.

Kenderaan Robotik Penghindaran Halangan
Prinsip Kerja:
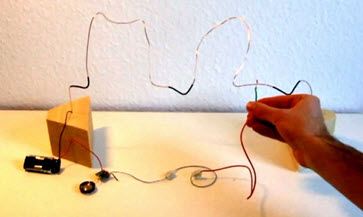
Penghindaran halangan kenderaan robotik menggunakan sensor ultrasonik untuk pergerakannya. Pengawal mikro dari 8051 keluarga digunakan untuk mencapai operasi yang diinginkan. Motor disambungkan melalui IC pemandu motor ke mikrokontroler. Sensor ultrasonik terpasang di hadapan robot.
Setiap kali robot menuju ke jalan yang diinginkan, sensor ultrasonik memancarkan gelombang ultrasonik secara berterusan dari kepala sensornya. Setiap kali ada halangan di hadapannya gelombang ultrasonik dipantulkan dari suatu objek dan maklumat itu disampaikan kepada pengawal mikro. Mikrokontroler mengawal motor kiri, kanan, belakang, depan, berdasarkan isyarat ultrasonik. Untuk mengawal kelajuan setiap modulasi lebar denyut motor digunakan (PWM).

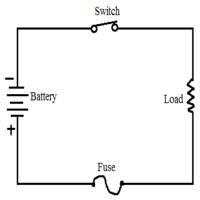
Blok Diagram Kenderaan Penghindaran Halangan Robotik
Sensor berbeza digunakan untuk mengelakkan halangan Kenderaan robotik
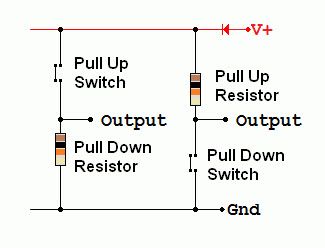
1. Pengesanan halangan (sensor IR):
Sensor IR digunakan untuk pengesanan halangan. Sinyal output sensor dihantar ke mikrokontroler. Mikrokontroler mengawal kenderaan (maju / belakang / berhenti) dengan menggunakan motor DC yang diletakkan di dalam kenderaan. Sekiranya ada halangan yang diletakkan sebaris, sensor IR gagal menerima sinar cahaya dan memberi isyarat kepada pengawal mikro. Pengawal mikro akan menghentikan kenderaan dengan segera dan siren akan menyala. Selepas satu minit robot akan memeriksa status jalan jika ada halangan yang dikeluarkan robot akan bergerak jauh, robot akan kembali ke tempat permulaan. Sensor mengesan objek dengan mengeluarkan ledakan ultrasonik pendek dan kemudian mendengar eko. Di bawah kawalan mikrokontroler host, sensor memancarkan letupan 40 kHz pendek. Letupan ini bergerak atau bergerak melalui udara mengenai artikel dan selepas itu melantun sekali lagi ke sensor. Sensor memberikan denyut output ke host yang akan berakhir ketika gema dikesan maka lebar satu denyut ke yang berikutnya diambil ke dalam perhitungan oleh program untuk memberikan hasil dalam jarak objek.
dua. Pengesanan laluan (sensor jarak):
Yang normal menyebabkan kedua-dua sensor memberikan garis panduan dan robot mengikutinya terus ke jalan. Apabila garisan berakhir pada masa itu robot berbalik pada 180 dan membalikkan tempat yang sama.

Menjadi Talian
Sensor jarak digunakan untuk pengesanan laluan. Apabila sensor kanan tidak dikesan di garis lengkung, mikrokontroler mengaktifkan motor kiri untuk membelok ke kiri sehingga isyarat dari sensor kanan. Setelah isyarat dikesan sensor kanan, kedua motor diaktifkan untuk maju. Apabila garisan berakhir pada masa itu robot berbalik pada 180 dan membalikkan tempat yang sama.

Kehilangan Talian
3. Sensor Ultrasonik:
Sensor ultrasonik digunakan untuk pengesanan halangan. Sensor ultrasonik memancarkan gelombang ultrasonik dari kepala sensornya dan sekali lagi menerima gelombang ultrasonik yang dipantulkan dari suatu objek.
Terdapat banyak aplikasi yang menggunakan sensor ultrasonik seperti sistem penggera arahan, pembuka pintu automatik, dll. Sensor ultrasonik sangat padat dan mempunyai prestasi yang sangat tinggi.

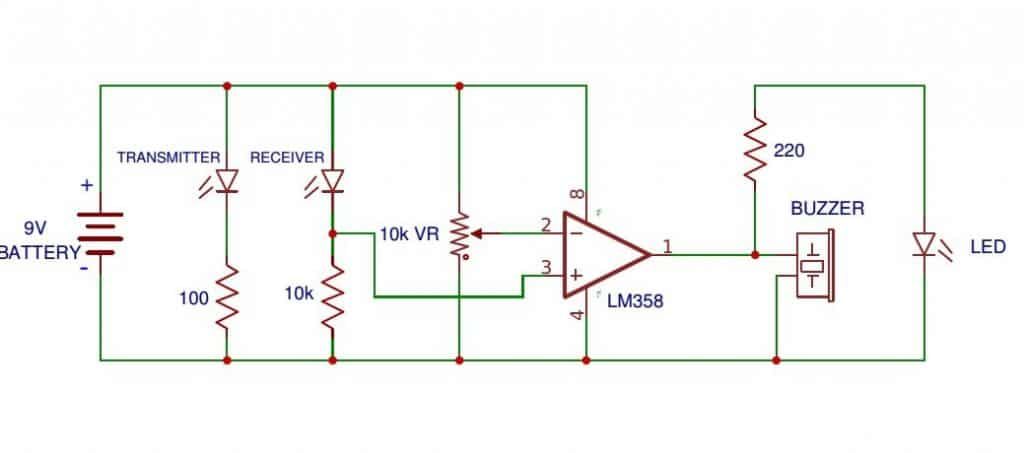
Diagram Am Sensor Ultrasonik
Prinsip Kerja:
Sensor ultrasonik memancarkan isyarat pendek dan frekuensi tinggi. Ini merambat di udara dengan kelajuan suara. Sekiranya mereka memukul objek apa pun, maka mereka memantulkan isyarat gema ke sensor. Sensor ultrasonik terdiri daripada multivibrator, terpaku pada pangkal. Multivibrator adalah gabungan dari resonator dan penggetar. Resonator menyampaikan gelombang ultrasonik yang dihasilkan oleh getaran. Sensor ultrasonik terdiri daripada dua bahagian pemancar yang menghasilkan gelombang bunyi 40 kHz dan pengesan mengesan gelombang bunyi 40 kHz dan menghantar isyarat elektrik kembali ke mikrokontroler.

Prinsip Kerja Ultrasonik
Sensor ultrasonik membolehkan robot melihat dan mengenali sesuatu objek, mengelakkan halangan, mengukur jarak. Julat operasi sensor ultrasonik adalah 10 cm hingga 30 cm.
Operasi sensor ultrasonik:
Apabila denyut elektrik voltan tinggi digunakan pada transduser ultrasonik, ia bergetar melintasi spektrum frekuensi tertentu dan menghasilkan gelombang gelombang bunyi. Setiap kali ada halangan di hadapan sensor ultrasonik gelombang suara akan memantulkan dalam bentuk gema dan menghasilkan denyutan elektrik. Ini menghitung masa yang diperlukan antara mengirim gelombang suara dan menerima gema. Pola gema akan dibandingkan dengan corak gelombang suara untuk menentukan keadaan isyarat yang dikesan.
Catatan: Penerima ultrasonik akan mengesan isyarat dari pemancar ultrasonik semasa gelombang pemancaran memukul objek. Gabungan kedua-dua sensor ini akan membolehkan robot mengesan objek di jalannya. Sensor ultrasonik terpasang di depan robot dan sensor itu juga akan membantu robot menavigasi lorong di mana-mana bangunan.
Aplikasi Sensor Ultrasonik:
- Perubahan automatik terhadap isyarat lalu lintas
- Sistem penggera penceroboh
- Alat pengira menukar suis meter parkir
- Sonar belakang kenderaan
Ciri-ciri Sensor Ultrasonik:
- Ringkas dan ringan
- Kepekaan tinggi dan tekanan tinggi
- Kebolehpercayaan yang tinggi
- Penggunaan kuasa 20mA
- Komunikasi masuk / keluar nadi
- Sudut penerimaan yang sempit
- Memberikan anggaran pemisahan tanpa hubungan yang tepat dalam jarak 2cm hingga 3m
- LED titik letupan menunjukkan anggaran dalam kemajuan
- Header 3 pin menjadikannya mudah untuk disambungkan menggunakan pautan pengembangan servo
Aplikasi Kenderaan Robotik Penghindaran Halangan:
- Terutama aplikasi ketenteraan
- Ia boleh digunakan untuk perang bandar
Kini jelas mendapat idea mengenai konsep kenderaan robot menggunakan sensor ultrasonik pengesanan halangan jika ada pertanyaan lebih lanjut mengenai topik ini atau konsep projek elektrik dan elektronik meninggalkan komen di bawah.
Kredit Foto:
- Diagram Am Sensor Ultrasonik oleh Letsmakerobots
- Prinsip Kerja Sensor Ultrasonik oleh Mikrosonik


{kind=link}