Catatan tersebut menerangkan halangan sederhana untuk mengelakkan litar robot tanpa mikrokontroler dan tanpa menggunakan litar pemandu motor atau IC khas. Idea itu diminta oleh Tuan Faiyyaz
Rekaan
Pada dasarnya ia dalam bentuk a kenderaan bergerak yang dapat mengesan dan mengelakkan rintangan yang berpotensi di jalannya dan mengubah arahnya dengan tepat sehingga gerakannya tetap tidak terganggu, sederhana!
Operasi ini secara automatik tanpa sebarang campur tangan manual atau manusia.
Idea yang dikemukakan mengenai penghindaran robot tanpa mikrokontroler seperti namanya tidak menggunakan mikrokontroler dan oleh itu sangat mudah dibina dan sesuai untuk mana-mana peminat baru.
Semasa merancang litar, saya menyedari bahawa untuk melaksanakan prinsip tersebut, diperlukan sekurang-kurangnya beberapa modul sensor halangan, kerana menggunakan satu modul dapat menyebabkan pergerakan motor yang tidak menentu dan mungkin tidak dapat membantu pengalihan atau putaran kenderaan yang lancar ke arah jalan bebas.
Pemasangan motor kenderaan agak serupa dengan kereta mainan alat kawalan jauh yang telah saya bincangkan di salah satu catatan sebelumnya.
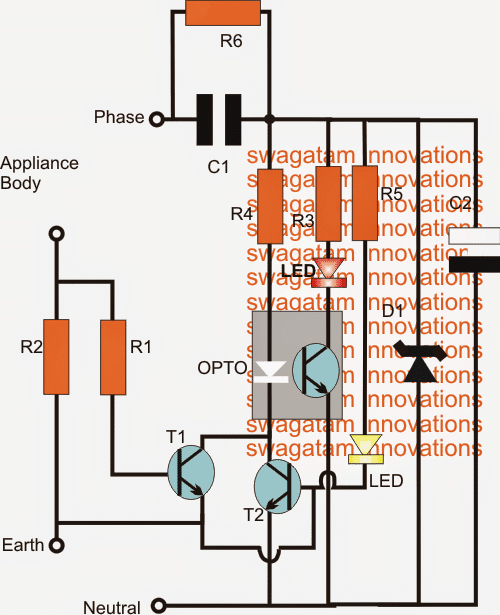
Gambar rajah berikut mewakili salah satu modul sistem, dan oleh itu diperlukan dua atau sepasang modul tersebut di seberang kanan dan kiri kenderaan.
Ideanya mudah dan berfungsi tanpa mikrokontroler dan tanpa IC pemandu motor khas. Ini bermakna anda boleh membuatnya tanpa sebarang jenis pengekodan dan tanpa menggunakan IC pemandu motor yang kompleks ..... dan litar ini membolehkan anda menggunakan motor DC apa pun tanpa mengira kuasanya, jadi halangan kuasa tinggi yang mengelakkan kenderaan dibuat menggunakan litar ini yang biasanya digunakan di pusat membeli-belah dan kedai runcit yang serupa.
Rajah Litar

Sekarang mari kita cuba memahami litar di atas dengan bantuan penjelasan berikut:
Bagaimana ia berfungsi
IC 555 dikonfigurasi sebagai pemancar IR dan diatur untuk menghasilkan frekuensi 38kHz konstan, sementara litar transistor bersebelahan dikonfigurasi sebagai tahap penerima atau tahap sensor IR.
Mari kita anggap ia adalah modul sebelah kanan, dan anggap modul ini adalah yang pertama untuk mengesan halangan di jalan tersebut.
Oleh itu sebaik sahaja halangan dikesan, frekuensi 38kHz yang dihasilkan oleh IC 555 dipantulkan ke arah sensor litar penerima bersebelahan.
Penerima dengan serta-merta mengaktifkan transistor yang berkaitan sehingga transistor pemacu akhir dihambat daripada melakukan.
Sekarang motor yang dikendalikan oleh transistor ini seharusnya terletak di sebelah kiri kenderaan, iaitu di seberang modul ini ... sama motor yang berada di sebelah kanan sebenarnya dikendalikan oleh modul sebelah kiri .
Akibatnya, apabila modul pengesan halangan sebelah kanan yang diasumsikan di atas diaktifkan, ia menghentikan motor sebelah kiri, sementara motor sebelah kanan dibiarkan bergerak normal.
Keadaan ini mengakibatkan kenderaan terpaksa mengambil pengalihan sebelah kiri ... yang bermaksud sekarang modul kiri yang diandaikan mula mendapat isyarat rintangan yang lebih kuat dan terus memaksa kenderaan untuk bergerak lebih keras pada pengalihan yang sedang berlangsung sehingga sepenuhnya dapat mengelakkan halangan . Modul kini berhenti menerima isyarat halangan dan kenderaan mula bergerak ke hadapan seperti biasa di jalan barunya.
Semasa pengalihan di atas dilakukan modul sebelah kiri terpaksa menjadi semakin terpencil dan jauh dari rintangan sehingga tidak mendapat kesempatan untuk campur tangan dalam prosedur, dan memungkinkan pengalihan kenderaan yang bersih dan lancar.
Tepat prosedur yang sama dilaksanakan sekiranya modul sebelah kiri merasakan halangan di depan modul sisi kanan, di mana kenderaan terpaksa bergerak lebih keras dan lebih keras ke arah kanan.
Kita juga dapat melihat tahap litar 'disabling' dalam modul yang saling berkaitan melintasi modul kiri dan kanan. Tahap ini sengaja diperkenalkan untuk memastikan bahawa kedua-dua modul tidak pernah diaktifkan bersama.
Oleh itu, sebagai contoh jika modul sebelah kiri menjadi yang pertama untuk mengesan rintangan, ia segera mematikan modul sebelah kanan dan memulakan pengalihan kenderaan di sebelah kanan dan sebaliknya.
IC sensor boleh menjadi siri TSOP17XX standard
Untuk maklumat lebih lanjut mengenai IC sensor di atas, anda boleh belajar cara menghubungkan TSOP1738 IC
Dan motor harus dilengkapi dengan kotak gear supaya pergerakan pada asalnya dikekalkan pada tahap terkawal.
Pemasangan Roda
Susunan lengkap modul kiri dan kanan dan sambungan elektrik yang berkaitan dapat dilihat pada gambar di bawah:

Kemas kini
Sedikit pemikiran memberitahu kita bahawa halangan mudah di atas untuk mengelakkan rangkaian robot juga dapat dilaksanakan dengan menggunakan modul tunggal, dan bukannya keduanya.
Walau bagaimanapun, satu modul akan membolehkan kenderaan melakukan pengalihan satu sisi setiap kali ia mengesan halangan, oleh itu sistem dapat dikonfigurasi untuk mengambil pengalihan arah jam atau arah berlawanan arah jam bergantung pada motor mana yang dihubungkan dengan litar untuk tindakan tersebut.
Contoh penyediaan dapat dilihat dalam gambar berikut:

Namun, nampaknya ada satu masalah dengan pemasangan motor tunggal di atas. Sekiranya andaian kenderaan tersebut menjumpai sudut bersudut tegak di sebelah kiri. Ini akan memaksa kenderaan untuk terus bergerak berlawanan arah jam, sehingga mengambil putaran U, dan mulai bergerak kembali ke arah yang sama dari tempat ia bermula. Ini bukan sesuatu yang dihargai oleh pengguna.
Sebelumnya: Resistor SMD - Pengenalan dan Kerja Seterusnya: Bagaimana Accelerometer Berfungsi