Walaupun litar kawalan jauh quadcopter dapat diperoleh dengan mudah dari pasar atau dari mana-mana kedai dalam talian, penggemar elektronik yang gemar tidak pernah dibenarkan untuk mengetahui bagaimana sebenarnya fungsi ini dan adakah ini boleh dibina di rumah?
Dalam artikel ini kita akan berusaha membina sebuah litar kawalan jauh quadcopter sederhana menggunakan komponen diskrit dan menggunakan modul kawalan jauh RF, dan tanpa melibatkan litar berasaskan MCU yang kompleks.
Panduan langkah demi langkah sebenarnya akan membuat penggemar yang berminat memahami bagaimana sebuah quadcopter dapat dikendalikan dengan menggunakan konsep PWM.
Kita sudah belajar asas quadcopter , sekarang mari kita selidiki bahagian alat kawalan jauh yang akhirnya akan membantu menerbangkan unit dari jauh.
Modul Asas Diperlukan
Bahan-bahan utama yang mungkin diperlukan untuk projek diberikan seperti di bawah:
Kami secara asasnya memerlukan 3 peringkat litar berikut:
1) modul kawalan jauh Tx, Rx 4 arah - 1set
2) Litar penjana PWM berasaskan IC 555 - 4nos
3) Litar pengawal motor BLDC - 4nos
Oleh kerana ia adalah versi buatan sendiri, kami dapat mengharapkan beberapa ketidakcekapan dengan reka bentuk yang dicadangkan, seperti ketiadaan joystick untuk kawalan, yang diganti dengan periuk atau potensiometer, namun kemampuan kerja sistem dapat diharapkan setara dengan unit profesional.
Unit pemancar PWM genggam pada dasarnya akan terdiri daripada modul jarak jauh Tx yang disatukan dengan 4 litar kawalan PWM diskrit, sementara quadcopter perlu ditutup dengan litar 1 Rx yang disatukan dengan 4 litar pemacu BLDC diskrit.
Mari kita mulakan dengan litar motor quadcopter, dan lihat bagaimana pengawal motor BLDC perlu dikonfigurasi dan dipasang dengan litar Rx.
Litar Penerima Quadcopter PWM
Dalam salah satu catatan sebelumnya, kami belajar bagaimana pengawal motor BLDC serba boleh dibina menggunakan cip tunggal, namun reka bentuk ini tidak dirancang untuk mengoperasikan motor quadcopter yang lebih berat, oleh itu ia mungkin tidak sesuai untuk aplikasi ini.
Pilihan 'abang besar' untuk litar di atas ada untungnya dan menjadi sangat sesuai untuk memandu motor quadcopter. Terima kasih kepada TEXAS INSTRUMENTS, kerana memberi kami modul litar khusus aplikasi cip tunggal yang luar biasa.
Untuk mengetahui lebih lanjut mengenai IC pemacu BLDC semasa yang tinggi ini, anda boleh merujuk pada lembar data pdf yang sama
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
Susunan di bawah menunjukkan skema litar lengkap pengawal pemandu motor quadcopter menggunakan IC DRV11873 yang merupakan litar motor BLDC arus rendah yang serba lengkap yang terdiri daripada semua ciri perlindungan yang diperlukan seperti perlindungan beban berlebihan, perlindungan terma dan lain-lain. Modul ini pada dasarnya membentuk ESC untuk unit quadcopter kami sekarang.
Untuk maklumat lebih lanjut mengenai reka bentuk dan perincian PCB ini, anda boleh merujuk kepada dokumen asal di bawah:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Bagaimana ia berfungsi
Pin FS dan FG IC adalah untuk meningkatkan IC dengan kawalan tambahan melalui litar luaran, kerana kami tidak menggunakan ciri-ciri ini dalam reka bentuk kami, pin ini mungkin tidak digunakan dan dihentikan ke garis positif melalui perintang 100K.
Pin RD IC memutuskan arah putaran motor. Menyambungkan pin ini ke Vcc melalui perintang 100K membolehkan putaran berlawanan arah jarum jam pada motor sambil membiarkannya tidak tersambung melakukan sebaliknya dan membolehkan motor berputar mengikut arah jam.
Pin # 16 adalah input PWM digunakan untuk menyuntikkan input PWM dari sumber luaran, yang mengubah siklus tugas PWM mengubah kelajuan motor.
Pin FR, CS juga tidak relevan dengan keperluan dan oleh itu boleh dibiarkan tidak digunakan seperti yang ditunjukkan dalam rajah, dan ditamatkan ke garis positif melalui perintang 100K.
Pin U, V, W adalah output motor yang perlu dihubungkan dengan motor 3 fasa BLDC quadcopter masing-masing.
Pin pin COM adalah untuk menyambungkan wayar biasa motor 3 fasa, jika motor anda tidak mempunyai wayar biasa, anda boleh mensimulasikannya dengan menyambungkan 3 nos perintang 2k2 ke pin U, W, W dan kemudian bergabung diakhiri dengan pin COM IC.
Skema ini juga menunjukkan IC 555 yang dikonfigurasi dalam mod litar astabel PWM. Ini menjadi bahagian modul litar dan output PWM dari pinnya # 7 dapat dilihat dihubungkan dengan input PWM litar DRV IC untuk memulakan 4 motor dengan kelajuan asas yang tetap dan untuk membolehkan motor sentiasa melayang kelajuan di tempat tertentu.
Ini menyimpulkan litar ELC utama atau litar pemacu BLDC untuk reka bentuk quadcopter.
Kami memerlukan empat modul seperti itu untuk keempat motor dalam reka bentuk quadcopter kami.
Maknanya, 4 IC DRV seperti itu dan tahap IC 555 PWM perlu dikaitkan dengan masing-masing 4 motor quadcopter.
Modul-modul ini akan memastikan bahawa biasanya keempat-empat motor diatur pada kelajuan yang telah ditentukan dengan menerapkan isyarat PWM tetap dan identik pada setiap IC pengawal DRV yang berkaitan.
Sekarang mari kita pelajari bagaimana PWM dapat diubah melalui alat kawalan jauh untuk mengubah kelajuan motor individu menggunakan telefon bimbit kawalan jauh 4 saluran biasa.
Modul Penerima RF (Decoder PWM)

Litar di atas menunjukkan litar RF jarak jauh penerima yang seharusnya ditampung di dalam quadcopter untuk menerima data PWM tanpa wayar luaran dari telefon bimbit pemancar jarak jauh pengguna dan kemudian memproses isyarat dengan tepat untuk memberi makan modul pengawal DRV yang disertakan seperti yang dijelaskan dalam bahagian sebelumnya.
4 output yang dinamakan sebagai PWM # 1… .PWM # 4 perlu dihubungkan dengan pin PWM # 15 dari DRV IC seperti yang ditunjukkan dalam rajah sebelumnya.
Pinout PWM ini dari unit penerima RF akan diaktifkan setiap kali butang yang sesuai ditekan oleh pengguna di telefon bimbit pemancarnya.
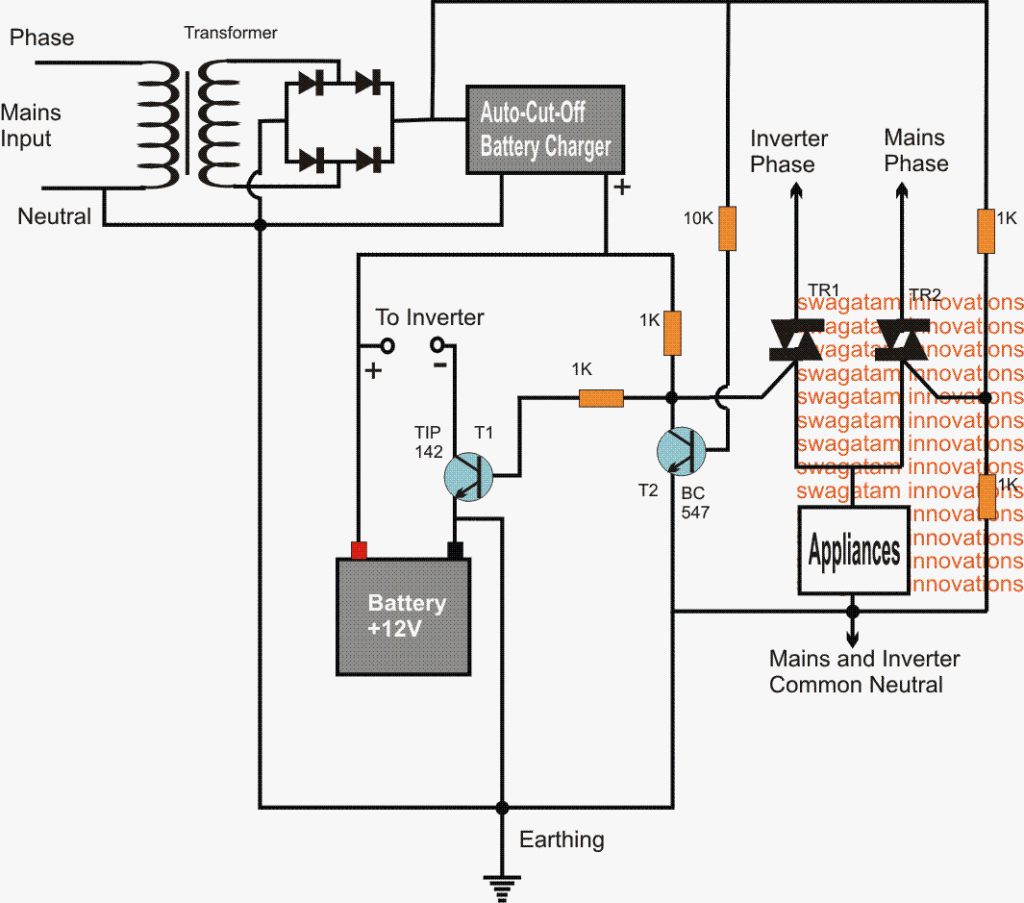
Bagaimana Pemancar RF perlu Wired (PWM Encoder)
Pada bahagian di atas kita telah membincangkan Rx atau litar penerima jauh dan bagaimana 4 outputnya perlu dihubungkan dengan modul pemacu ESC motor quadcopter.
Di sini kita melihat bagaimana pemancar RF sederhana perlu dibuat dan dikabelkan dengan litar PWM untuk menghantar data PWM secara wayarles ke unit penerima quadcopter sehingga kelajuan motor individu dikendalikan hanya dengan menekan butang, yang akhirnya menyebabkan quadcopter untuk mengubah arah atau kelajuannya, mengikut pilihan pengguna.

Litar yang ditunjukkan di atas menunjukkan perincian pendawaian modul pemancar. Ideanya kelihatan cukup sederhana, litar pemancar utama dibentuk oleh cip TSW434 yang menghantar isyarat PWM yang dikodkan ke atmosfera, dan HT12E yang menjadi tanggungjawab untuk memberi isyarat yang dikodkan ke cip TSW.
Isyarat PWM dihasilkan oleh 4 peringkat litar IC 555 yang berasingan yang mungkin sama dengan yang sebelumnya dibincangkan dalam modul pengawal DRV.
Isi PWM dari 4 IC dapat dilihat dihentikan ke pinout masing-masing IC HT12E pengekod melalui 4 butang tekan diskrit yang ditunjukkan sebagai SW1 ---- SW4.
Setiap butang ini sesuai dan menukar pinout modul penerima yang sama yang telah kita bincangkan sebelumnya dan ditunjukkan sebagai PWM # 1, PWM # 2… ..PWM # 4.
Maksudnya menekan SW1 boleh menyebabkan output PWM # 1 unit penerima aktif dan ini akan mula memberi isyarat PWM yang didekodkan yang diterima dari pemancar ke modul DRV yang berkaitan dan seterusnya menyebabkan motor yang berkenaan mengubah kelajuannya dengan sewajarnya.
Begitu juga, menekan SW2,3,4 dapat digunakan untuk mempengaruhi kecepatan 3 motor quadcopter lain sesuai keinginan pengguna.
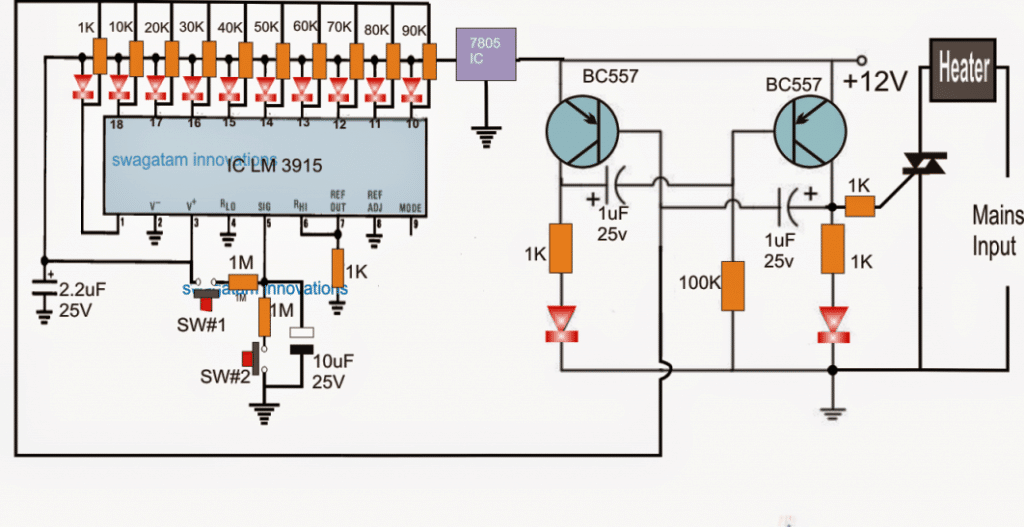
Litar IC 555 PWM
Litar 4 PWM yang ditunjukkan pada telefon bimbit pemancar RF di atas dapat dibina dengan merujuk pada rajah berikut, yang sama dengan yang dilihat pada litar ESC pengawal DRV kami.

Perlu diingat bahawa periuk 5K dapat dalam bentuk periuk biasa dan periuk ini dapat digunakan tambahan dengan tombol untuk memilih kecepatan yang berbeda pada motor yang sesuai.
Maksudnya dengan menekan butang yang dipilih dan secara bersamaan menggerakkan 5KPWMpot yang sesuai dapat menyebabkan quadcopter meningkat atau menurunkan kelajuannya ke arah yang dimaksudkan.
Sebagai alternatif, PWM pada awalnya dapat diatur pada tingkat yang lebih tinggi atau lebih rendah dan kemudian tombol yang sesuai ditekan untuk memungkinkan motor quadcopter yang sesuai mencapai kecepatan yang disukai, seperti pada pengaturan PWM.
Spesifikasi Motor Quadcopter
Litar kawalan jauh Qiadcopter yang dijelaskan di atas dimaksudkan untuk digunakan hanya untuk tujuan paparan, dan tidak dapat digunakan untuk mengangkat beban atau kamera. Ini menunjukkan bahawa motor yang digunakan dalam reka bentuk sebaiknya jenis arus rendah.
IC DRV11873 direka untuk menggerakkan motor yang dinilai pada motor 15V, 1.5 amp atau sekitar 20 watt ... jadi mana-mana motor BLDC 3 fasa yang diberi nilai 15 hingga 30 watt dapat digunakan untuk tujuan tersebut.
Bateri untuk reka bentuk quadcopter ini boleh menjadi bateri Li-ion 12v Lipo pr yang mampu membekalkan puncak 15V pada arus berterusan 1.5 amp.
Perincian Spesifikasi
Motor DC Miniatur Brushless Outrunner 1306N
Jenis: Motor Mikro
Pembinaan: Magnet Kekal
Pergantungan: Tanpa berus
Kelajuan (RPM): 2200rpm / v
Arus Berterusan (A): 1.5 ~ 2.6A
Voltan (V): 7.4 ~ 11.1V
motor dc miniatur: AX-1306N
berat: 8g
diameter aci: 1.5mm
Bateri LI-PO: 2-3s
arus operasi: 1.5 ~ 2.6A
kecekapan maksimum: 67%

Sebelumnya: Litar Pemandu Motor BLDC Sensorless Seterusnya: Litar Pengawal Pemanas Menggunakan Tombol Tekan