Catatan tersebut menerangkan permulaan pam tenggelam automatik, litar berhenti dengan perlindungan larian kering untuk melaksanakan peralihan ON / OFF automatik motor sebagai tindak balas terhadap paras air tinggi / rendah tangki overhead.
Konsep Litar
Dalam salah satu catatan sebelumnya, kami mempelajari konsep serupa yang juga berkaitan dengan konsep fungsi mula / berhenti automatik butang kontaktor pam tenggelam , bagaimanapun sejak di sini sensor yang terlibat suis apungan , reka bentuknya kelihatan agak rumit dan tidak sesuai untuk semua orang.
Lebih-lebih lagi, perlindungan kering kering yang termasuk dalam reka bentuk bergantung pada perubahan suhu motor untuk melaksanakan perlindungan motor yang diperlukan. Ciri ini juga tidak terlalu diinginkan oleh orang awam kerana memasang sensor haba di atas motor bawah tanah tidak mudah.
Dalam catatan ini saya telah berusaha untuk menghilangkan semua kerumitan ini dan merancang litar yang ditampilkan untuk merasakan kehadiran air hanya melalui sensor logam yang direndam dalam sumber air yang berkaitan.
Operasi Litar
Mari kita fahami cadangan permulaan automatik pam tenggelam, litar berhenti dengan perlindungan kering.

IC 4049 tunggal dapat dilihat terlibat untuk keseluruhan penginderaan, mulakan tindakan berhenti dan pelaksanaan perlindungan kering.
Gerbang yang terlibat di sini adalah 6 pintu NOT dari IC 4049 yang pada dasarnya rigged sebagai penyongsang (untuk membalikkan kekutuban voltan yang diberi pada inputnya).
Mari kita anggap air di dalam tangki kepala di bawah ambang bawah yang diinginkan, seperti yang ditunjukkan dalam rajah di atas.
Keadaan itu menghilangkan potensi positif yang disalurkan melalui air ke input N1. N1 bertindak balas terhadap ini dengan menyebabkan positif muncul pada pin outputnya, yang langsung menyebabkan C1 mula mengecas melalui R2.
Keadaan di atas juga membolehkan positif dari output N1 mencapai input N2, yang seterusnya menghasilkan rendah atau negatif di pangkal T1 melalui R3 .... relay yang bersangkutan kini beralih AKTIF dan mengaktifkan 'MULAI butang kontaktor .... namun pengaktifan geganti hanya bertahan sekejap atau lebih sehingga C1 terisi penuh, panjang ini dapat ditetapkan dengan mengubah nilai C1 / R2 dengan tepat.
Buat masa ini mari kita lupakan tahap N5 / N6 yang diposisikan untuk pelaksanaan perlindungan kering.
Mari kita anggap pam berjalan dan menuangkan air ke dalam tangki OH yang ditunjukkan.
Air sekarang mulai mengisi di dalam tangki, sehingga level mencapai tepi tangki 'mencium' sensor yang sesuai dengan input N3.
Ini memungkinkan positif melalui air untuk memberi makan input N3, memungkinkan outputnya menjadi rendah (negatif), yang langsung menyebabkan C2 mulai mengisi melalui R5, tetapi dalam proses input N4 juga menjadi rendah dan outputnya terbalik ke tinggi mendorong pemandu geganti untuk mengaktifkan geganti.
Relay atas langsung mengaktifkan tetapi hanya sesaat, menukar butang 'STOP' kontaktor, dan menghentikan motor pam. Masa relay boleh ditetapkan dengan mengubah nilai C2 / R5 dengan tepat.
Penjelasan di atas menguruskan kawalan paras air automatik dengan menukar butang start / stop submersible melalui relay litar. Mungkin menarik untuk belajar bagaimana perlindungan kering kering dirancang untuk mencegah bahaya jalan kering jika tidak ada air di dalam borewell atau tangki bawah tanah.
Mari kembali ke keadaan awal ketika air di OHT jatuh di bawah ambang bawah dan memberikan rendah pada input N1 .... yang juga menjadikan rendah pada input N5.
Output N5 berubah tinggi kerana ini dan memberikan bekalan positif untuk C3 sehingga dapat mulai mengecas.
Namun kerana proses ini juga seharusnya dapat menghidupkan motor, jika air ada, pam mungkin mulai menuangkan air di OHT yang seharusnya dapat dikesan oleh input N6, menyebabkan outputnya menjadi rendah.
Dengan output N6 rendah, C3 dihambat pengisian, dan keadaan tetap buntu ... dan motor terus mengepam air tanpa perubahan dalam prosedur yang dijelaskan sebelumnya.
Tetapi, anggap motor mengalami larian kering kerana ketiadaan air di dalam sumur .... seperti yang dinyatakan di atas C3 mula mengecas dan output N6 tidak pernah berubah menjadi negatif untuk menghentikan C3 daripada mengecas sepenuhnya .... oleh itu C3 dapat untuk menyelesaikan pengisiannya dalam jangka masa yang telah ditentukan (diputuskan oleh C3 / R8) dan akhirnya menghasilkan tinggi (positif) pada input N3.
N3 bertindak balas terhadap hal ini dengan cara yang sama seperti ketika air di dalam tangki dikesan di ambang paling atas .... mendorong peralihan relay atas dan menghentikan motor daripada berjalan lebih jauh.
Perlindungan kering kering untuk permulaan pam tenggelam yang dibincangkan, litar berhenti dilaksanakan.
Senarai Bahagian
- R1, R4, R9 = 6M8
- R3, R7, R6 = 10K
- R8 = 100K
- R2, R5, C1, C2, C3 = untuk ditakrifkan dengan eksperimen
- N1 ------ N6 = IC 4049
- SEMUA DIOD = 1N4007
- RELAYS = 12V, 10AMP
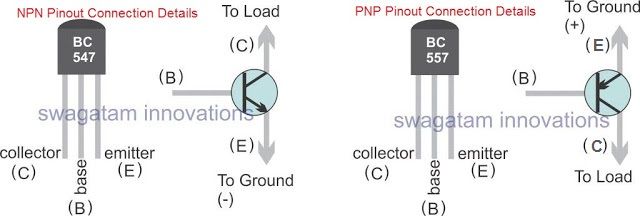
- T1 = BC557
- T2 = BC547
Sepasang: Pengatur Motosikal, Rectifier Tester Circuit Seterusnya: Litar Simulator LED Putaran Beacon