Di banyak rumah dan tempat awam lain, air tanah digunakan, yang dipam ke tangki overhead menggunakan pam air yang dikendalikan oleh motor elektrik. Mengendalikan pam sering menjadi keperluan untuk mengelakkan pembaziran air.
Di banyak rumah dan tempat awam lain, air tanah digunakan, yang dipam ke tangki overhead menggunakan pam air yang dikendalikan oleh motor elektrik. Mengendalikan pam sering menjadi keperluan untuk mengelakkan pembaziran air.
1. Hubungi Pengawal Aras Air
Berikut adalah litar mudah untuk mengawal pam Air. Apabila paras air di tangki atas kepala melebihi tahap yang diperlukan, pam secara automatik mematikan dan menghentikan proses mengepam sehingga menghalang aliran air yang berlebihan. Ia menggunakan geganti untuk memutuskan bekalan kuasa ke pam air.
Litar dibina menggunakan komponen berikut:
- CMOS IC CD4001 : Ini adalah IC 14 pin serbaguna yang mengandungi 4 gerbang NOR. Setiap gerbang NOR mempunyai dua input dan satu output. Oleh itu IC mempunyai 8 pin input dan 4 pin output, satu pin Vcc (disambungkan ke bekalan voltan positif) dan satu Vss (disambungkan ke bekalan negatif). Ciri-ciri asasnya meliputi - Voltan bekalan maksimum: 15V, Voltan bekalan minimum: 3V, Kelajuan operasi maksimum: 4MHz. Ia boleh digunakan dalam penghasil nada, pengesan logam dll.
- Transistor BC547 : Ini adalah transistor persimpangan bipolar NPN dan digunakan terutamanya untuk tujuan penguatan dan pengalihan. Ciri-cirinya merangkumi kenaikan arus maksimum 800. Ia digunakan dalam konfigurasi CE ketika digunakan sebagai penguat.
- Bateri : Bekalan DC 9V diberikan melalui bateri untuk menghidupkan litar.

Litar menggunakan CD CMOS IC 4001/4011 untuk menggerakkan geganti. Pintu masuknya 1 digunakan untuk menyambungkan probe untuk mengesan paras air. Satu probe disambungkan ke pintu 1 IC dan satu lagi probe ke tanah. Apabila probe A yang disambungkan ke gerbang 1 IC terapung, input gerbang 1 tetap tinggi dan pin output 4 naik tinggi dan transistor pemacu relay melakukan. Relay akan diaktifkan. Bekalan kuasa pam air disambungkan melalui kenalan relay biasa dan NO sehingga apabila relay dihidupkan, pam air berfungsi. LED menunjukkan kerja geganti. Apabila paras air naik dan bersentuhan dengan probe A dan B, output IC berubah rendah dan geganti mati untuk menghentikan pengepaman.
Pada mulanya apabila A dan B tidak tersambung, iaitu permukaan air rendah, pin input IC dari logik tinggi dan menurut jadual kebenaran gerbang NOR, output pada pin3 akan berada pada logik rendah. Oleh kerana pin3 dipendekkan ke pin 5 dan 6, maka input ke gerbang NOR lain akan menjadi isyarat rendah logik. Ini memberi isyarat logik tinggi ke pin output yang sesuai 4. Semasa arus mengalir melalui perintang ke dasar transistor, ia mula melakukan dan bertindak sebagai suis tertutup. Relay yang disambungkan ke pemungut transistor dihidupkan dan kenalan NO disambungkan ke kenalan biasa dan pam air mendapat bekalan kuasa dari sesalur elektrik dan mula berfungsi.
Sekarang apabila paras air meningkat di tangki meningkat sehingga probe A dan B dihubungkan melalui air, arus mengalir melaluinya (Oleh kerana air adalah konduktor) dan pin 1 dan 2 disambungkan melalui A dan B ke bekalan negatif bateri .
Oleh itu, pin output3 berada pada tahap logik tinggi, menyebabkan pin input dari pintu NOR yang lain berada pada tahap logik tinggi dan dengan demikian pin4 output yang sesuai berada pada tahap rendah logik. Transistor mendapat pemotongan kerana kekurangan arus bias dan geganti akan dinyahaktifkan dan bekalan kuasa ke tangki air terputus.
dua. Pengawal Tahap Air tanpa sentuhan
Selain daripada teknik yang dibincangkan di atas, ada cara lain untuk mengawal paras air di tangki dengan merasakannya menggunakan teknik Ultrasonik. Tidak seperti kaedah sebelumnya, ini tidak memerlukan kaedah bersentuhan dengan tangki air .
Sistem ini terdiri daripada bahagian-bahagian berikut
- Bekalan kuasa DC yang diatur untuk menukar bekalan AC ke voltan DC yang diatur menggunakan penyearah jambatan dan penapis.
- Modul ultrasonik yang terdiri daripada pemancar ultrasonik dan penerima untuk merasakan keadaan paras air tangki.
- Pengawal mikro yang berfungsi sebagai unit kawalan.
- Transistor dan unit MOSFET yang membentuk unit beralih
- Relay untuk mengawal penggunaan arus ke pam
- Pam yang merupakan beban

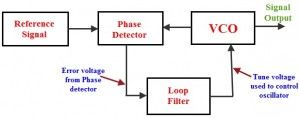
Rajah Blok Pengawal Aras Air
Sensor ultrasonik merasakan tahap air di dalam tangki dengan menghantar isyarat ultrasonik ke tangki. Air di dalam tangki memantulkan kembali isyarat ultrasonik, yang diterima oleh penerima. Sinaran ultrasonik atau bunyi yang diterima ditukar kepada denyut isyarat elektrik yang diterapkan pada Mikrokontroler. Denyutan ini menunjukkan tahap air di dalam tangki. Oleh kerana paras air menurun di bawah tahap tertentu, modul ultrasonik memberikan petunjuk melalui isyarat elektrik dan Mikrokontroler mendorong transistor ke keadaan mati, yang seterusnya menyebabkan MOSFET dihidupkan dan oleh itu geganti menjadi bertenaga dan pam tersebut dihidupkan. Sekiranya paras air berada di atas paras ambang, Pengawal Mikro akan mematikan geganti melalui transistor dan susunan MOSFET, sehingga mematikan pam.
3. Petunjuk Tahap Air Digital
Sistem ini digunakan hanya untuk merasakan tahap air dalam tangki dan menampilkan bacaan pada paparan 7 segmen.
Di sini papan litar yang terdiri daripada susunan wayar pengalir selari diletakkan di dalam tangki. Kabel ini berfungsi sebagai input kepada Priority Encoder yang menghasilkan output BCD berdasarkan bacaan input. Priority Encoder menggerakkan sekumpulan transistor yang seterusnya memberikan input ke BCD ke 7 segmen Decoder yang menggunakan isyarat BCD untuk menggerakkan paparan LED 7 segmen.

Petunjuk Tahap Air Tangki Overhead Pintar
Apabila unit input diletakkan di dalam tangki air, arus mengalir melalui wayar yang direndam di dalam air dan dengan itu jumlah input yang sesuai berada dalam keadaan logik tinggi. Encoder menerima input ini dan berdasarkan tahap keutamaan input, memberikan kod output digital yang sesuai dengan input dengan keutamaan tertinggi.
Oleh itu, jika arus mengalir melalui semua wayar, iaitu tangki penuh, kod output akan sesuai dengan tahap tertinggi. Di sini unit input atau skala dibahagikan kepada 10 tahap dari 0 hingga 9. Sekiranya semua input ke Encoder berada dalam keadaan tinggi, output juga merupakan isyarat logik tinggi yang mendorong semua transistor ke keadaan ON, sehingga semua input ke Decoder segmen BCD hingga 7 berada dalam keadaan logik rendah. Decoder segmen BCD hingga 7 hanya berfungsi sebagai penyongsang dan dengan itu memberikan isyarat logik yang tinggi dalam semua keluarannya dan dengan itu tahap tertinggi 9 dipaparkan pada Paparan.