
Hampir setiap perkembangan mekanikal yang kita lihat disekelilingi oleh motor elektrik. Mesin elektrik adalah kaedah menukar tenaga. Motor mengambil tenaga elektrik dan menghasilkan tenaga mekanikal. Motor elektrik digunakan untuk memberi tenaga kepada ratusan peranti yang kita gunakan dalam kehidupan seharian. Motor elektrik secara amnya dikelaskan kepada dua kategori yang berbeza: motor Arus Langsung (DC) dan motor Arus Bolak-balik (AC). Dalam artikel ini, kita akan membincangkan motor DC dan cara kerjanya. Dan juga bagaimana motor DC gear berfungsi.
Apa itu Motor DC?
KE Motor DC adalah motor elektrik yang berjalan pada kuasa arus terus. Dalam motor elektrik, operasi bergantung pada elektromagnetisme sederhana. Konduktor yang membawa arus menghasilkan medan magnet, apabila ini kemudian diletakkan di medan magnet luaran, ia akan menghadapi daya yang sebanding dengan arus di konduktor dan kekuatan medan magnet luaran. Ia adalah alat yang menukar tenaga elektrik menjadi tenaga mekanikal. Ini berfungsi berdasarkan fakta bahawa konduktor yang membawa arus yang diletakkan di medan magnet mengalami daya yang menyebabkannya berputar sehubungan dengan kedudukan asalnya. Motor DC praktikal terdiri daripada belitan medan untuk menyediakan fluks dan angker magnet yang bertindak sebagai konduktor.

Motor DC tanpa berus
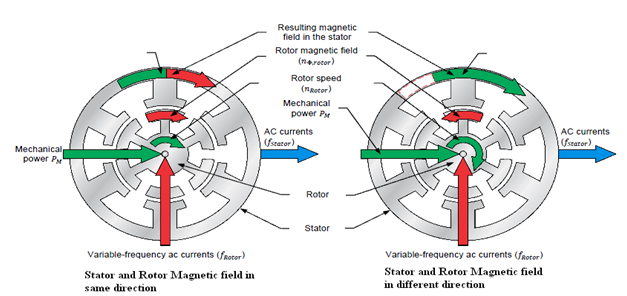
Input dari motor DC tanpa berus adalah arus / voltan dan outputnya adalah tork. Memahami operasi motor DC sangat mudah dari gambarajah asas ditunjukkan di bawah. Motor DC pada dasarnya terdiri daripada dua bahagian utama. Bahagian berpusing disebut pemutar dan bahagian pegun juga disebut stator. Pemutar berputar berkenaan dengan stator.
Rotor terdiri daripada belitan, belitan dihubungkan secara elektrik dengan komutator. Geometri berus, kenalan komutator, dan belitan rotor sedemikian rupa sehingga apabila daya digunakan, polariti penggulungan bertenaga dan magnet stator tidak sejajar dan pemutar akan berpusing sehingga hampir diluruskan dengan magnet medan stator.
Semasa pemutar mencapai penjajaran, sikat bergerak ke kenalan komutator seterusnya dan memberi tenaga penggulungan seterusnya. Putaran membalikkan arah arus melalui belitan rotor, mendorong putaran medan magnet pemutar, mendorongnya untuk terus berputar.
Pembinaan Motor DC
Pembinaan motor DC ditunjukkan di bawah. Adalah sangat penting untuk mengetahui reka bentuknya sebelum mengetahui ia berfungsi. Bahagian penting motor ini merangkumi angker dan stator.

DC MOTOR
Gegelung angker adalah bahagian berputar sedangkan bahagian pegun adalah stator. Dalam ini, gegelung angker disambungkan ke bekalan DC yang merangkumi berus dan juga komutator. Fungsi utama komutator adalah untuk menukar AC ke DC yang disebabkan oleh angker. Aliran arus dapat dibekalkan dengan menggunakan sikat dari bahagian putar motor ke arah beban luar yang tidak aktif. Susunan angker boleh dilakukan di antara dua kutub elektromagnet atau kekal.
Bahagian Motor DC
Pada motor DC, terdapat pelbagai reka bentuk motor popular yang tersedia seperti magnet kekal, seri, luka kompaun, shunt, shunt yang stabil. Secara amnya, bahagian motor dc sama dalam reka bentuk popular ini tetapi keseluruhan operasi ini sama. Bahagian utama motor dc merangkumi yang berikut.
Pemegun
Bahagian pegun seperti stator adalah salah satu bahagian dalam bahagian motor DC yang merangkumi belitan medan. Fungsi utama ini adalah untuk mendapatkan bekalan.
Pemutar
Rotor adalah bahagian dinamik motor yang digunakan untuk membuat putaran mekanikal unit.
Berus
Berus menggunakan komutator berfungsi terutamanya sebagai jambatan untuk memperbaiki litar elektrik pegun ke arah pemutar.
Komutator
Ini adalah cincin pemisah yang dirancang dengan segmen tembaga. Ia juga merupakan salah satu bahagian motor dc yang paling penting.
Gulungan Padang
Gulungan ini dibuat dengan gegelung medan yang dikenali sebagai wayar tembaga. Gulungan ini mengelilingi slot yang dibawa melalui kasut tiang.
Lilitan Angker
Pembinaan belitan ini pada motor DC adalah dua jenis seperti Lap & Wave.
Kuk
Kerangka magnet seperti kuk direka dengan besi tuang atau keluli kadang-kadang. Ia berfungsi seperti pengawal.
Tiang
Tiang di motor merangkumi dua bahagian utama seperti inti tiang dan juga kasut tiang. Bahagian penting ini dihubungkan bersama melalui daya hidraulik & disambungkan ke kuk.
Gigi / Slot
Pelapik slot tidak konduktif sering tersekat di dinding slot serta gegelung untuk keselamatan dari awal, sokongan mekanikal & penebat elektrik tambahan. Bahan magnet antara slot dipanggil gigi.
Perumahan Motor
Perumahan motor memberi sokongan pada berus, galas & teras besi.
Prinsip Kerja
Mesin elektrik yang digunakan untuk menukar tenaga dari elektrik ke mekanikal dikenali sebagai motor DC. The Prinsip kerja motor DC adalah bahawa apabila konduktor yang membawa arus terletak di dalam medan magnet, maka ia mengalami daya mekanikal. Arah kekuatan ini dapat diputuskan melalui peraturan kiri Flemming dan juga besarnya.
Sekiranya jari pertama dilanjutkan, jari kedua, serta ibu jari tangan kiri, akan menegak satu sama lain & jari utama menandakan arah medan magnet, jari seterusnya menunjukkan arah semasa & ibu jari seperti jari ketiga menandakan arah daya yang dialami melalui konduktor.
F = BIL Newton
Di mana,
‘B’ adalah ketumpatan fluks magnet,
‘Saya’ terkini
'L' adalah panjang konduktor di medan magnet.
Setiap kali belitan angker diberikan ke arah bekalan DC, maka arus arus akan diatur dalam belitan. Magnet penggulungan medan atau kekal akan memberikan medan magnet. Jadi, konduktor angker akan mengalami daya kerana medan magnet berdasarkan prinsip yang dinyatakan di atas.
Commutator direka bentuk seperti bahagian untuk mencapai tork uni-directional atau jalur daya akan terbalik setiap kali apabila pergerakan pergerakan konduktor terbalik dalam medan magnet. Jadi, ini adalah prinsip kerja motor DC.
Jenis Motor DC
Jenis motor dc yang berbeza dibincangkan di bawah.
Motor DC Geared
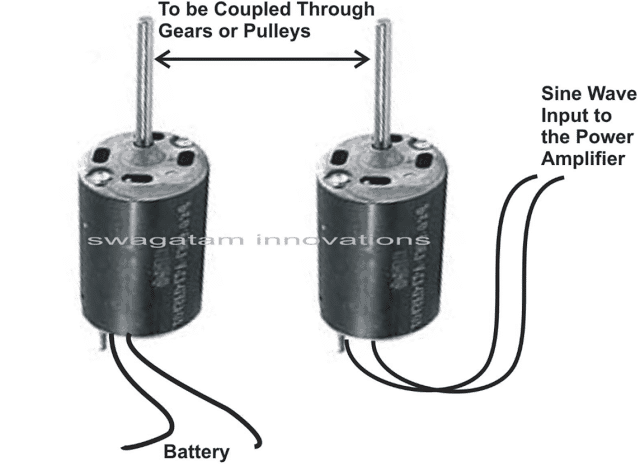
Motor berpacu cenderung mengurangkan kelajuan motor tetapi dengan peningkatan tork yang sesuai. Properti ini sangat berguna, kerana motor DC dapat berputar pada kelajuan terlalu cepat untuk digunakan oleh peranti elektronik. Motor yang digerakkan biasanya terdiri daripada motor berus DC dan kotak gear yang dipasang pada batang. Motor dibezakan sebagai diarahkan oleh dua unit yang bersambung. Ia mempunyai banyak aplikasi kerana biaya merancang, mengurangi kerumitan, dan membangun aplikasi seperti peralatan industri, penggerak, alat perubatan, dan robotik.
- Tidak ada robot yang baik yang dapat dibina tanpa gear. Semua perkara yang dipertimbangkan, pemahaman yang baik tentang bagaimana gear mempengaruhi parameter seperti tork dan halaju sangat penting.
- Gear berfungsi berdasarkan prinsip kelebihan mekanikal. Ini menunjukkan bahawa dengan menggunakan diameter roda gigi yang khas, kita dapat bertukar antara kecepatan putaran dan tork. Robot tidak mempunyai nisbah kelajuan dan tork yang diinginkan.
- Dalam robotik, tork lebih baik daripada kelajuan. Dengan gear, mungkin untuk menukar halaju tinggi dengan tork yang lebih baik. Peningkatan tork berbanding terbalik dengan penurunan kelajuan.

Motor DC Geared
Pengurangan Kelajuan pada Motor DC Geared
Pengurangan kelajuan gear terdiri daripada gear kecil yang menggerakkan gear yang lebih besar. Mungkin ada beberapa set set gear pengurangan ini di kotak gear pengurangan.

Pengurangan Kelajuan pada Motor DC yang diarahkan
Kadang-kadang objektif menggunakan motor roda gigi adalah untuk mengurangkan putaran poros motor dalam peranti yang digerakkan, misalnya pada jam elektrik kecil di mana motor segerak kecil mungkin berputar pada 1.200 rpm namun diturunkan menjadi satu rpm untuk mengemudi tangan kedua dan semakin berkurang dalam mekanisme jam untuk mendorong tangan minit dan jam. Di sini jumlah daya pendorong tidak relevan selagi ia mencukupi untuk mengatasi kesan geseran mekanisme jam.
Motor DC Seri
Motor Seri adalah motor siri DC di mana penggulungan medan dihubungkan secara dalaman secara bersiri dengan belitan angker. Motor siri memberikan tork permulaan yang tinggi tetapi tidak boleh dijalankan tanpa beban dan dapat menggerakkan beban poros yang sangat besar ketika pertama kali dihidupkan. Motor siri juga dikenali sebagai motor seri-luka.
Dalam motor siri, belitan medan dihubungkan secara bersiri dengan angker. Kekuatan medan berbeza dengan kemajuan arus angker. Pada saat kelajuannya dikurangkan oleh beban, motor siri ini menghasilkan tork yang lebih baik. Tork permulaannya lebih banyak daripada pelbagai jenis motor DC.
Ia juga dapat memancarkan dengan lebih mudah haba yang terbentuk dalam belitan kerana arus yang banyak dibawa. Kelajuannya berubah antara beban penuh dan tanpa beban. Semasa beban dikeluarkan, kelajuan motor meningkat, dan arus melalui gegelung angker dan medan menurun. Pengoperasian mesin besar yang dibongkar adalah berbahaya.

Seri Motor
Arus melalui gegelung angker dan medan berkurang, kekuatan garis fluks di sekitarnya semakin lemah. Sekiranya kekuatan garis fluks di sekitar gegelung dikurangkan pada kadar yang sama dengan arus yang mengalir melalui mereka, kedua-duanya akan menurun pada kadar yang sama pada
yang mana kelajuan motor meningkat.
Kelebihan
Kelebihan motor siri merangkumi yang berikut.
- Tork permulaan yang besar
- Pembinaan Ringkas
- Merancang adalah mudah
- Penyelenggaraannya mudah
- Menjimatkan kos
Permohonan
Seri Motor dapat menghasilkan daya putaran yang sangat besar, tork dari keadaan terbiar. Ciri ini menjadikan motor siri sesuai untuk peralatan elektrik kecil, peralatan elektrik serba boleh dan lain-lain. Motor siri tidak sesuai apabila diperlukan kelajuan berterusan. Sebabnya ialah halaju motor siri sangat berbeza dengan beban yang berbeza-beza.
Motor Shunt
Motor shunt adalah motor DC shunt, di mana belitan medan beralih ke atau dihubungkan selari dengan belitan angker motor. Motor DC shunt biasanya digunakan kerana peraturan kelajuannya yang terbaik. Oleh itu, kedua-dua belitan angker dan belitan medan ditunjukkan pada voltan bekalan yang sama, namun, terdapat cabang-cabang diskrit untuk aliran arus angker dan arus medan.
Motor shunt mempunyai ciri kerja yang agak berbeza daripada motor siri. Oleh kerana gegelung bidang shunt terbuat dari dawai halus, ia tidak dapat menghasilkan arus yang besar untuk bermula seperti medan seri. Ini menunjukkan bahawa motor shunt mempunyai daya kilas permulaan yang sangat rendah, yang memerlukan beban poros agak sedikit.

Motor Shunt
Apabila voltan digunakan pada motor shunt, arus yang sangat rendah mengalir melalui gegelung shunt. Angker untuk motor shunt serupa dengan motor siri dan ia akan menarik arus untuk menghasilkan medan magnet yang kuat. Oleh kerana interaksi medan magnet di sekitar angker dan medan yang dihasilkan di sekitar medan shunt, motor mula berputar.
Seperti motor siri, apabila angker mula berpusing, ia akan menghasilkan EMF belakang. EMF belakang akan menyebabkan arus di angker mula berkurang ke tahap yang sangat kecil. Jumlah arus yang akan diambil oleh angker secara langsung berkaitan dengan ukuran beban ketika motor mencapai kelajuan penuh. Oleh kerana beban pada amnya kecil, arus angker akan menjadi kecil.
Kelebihan
Kelebihan motor shunt merangkumi yang berikut.
- Prestasi kawalan yang sederhana, menghasilkan fleksibiliti yang tinggi untuk menyelesaikan masalah pemacu yang kompleks
- Ketersediaan tinggi, oleh itu usaha perkhidmatan minimum diperlukan
- Tahap keserasian elektromagnetik yang tinggi
- Jalan yang sangat lancar, oleh itu tekanan mekanikal sistem keseluruhan yang rendah dan proses kawalan dinamik yang tinggi
- Julat kawalan yang luas dan kelajuan rendah, oleh itu dapat digunakan secara universal
Permohonan
Motor Shunt DC sangat sesuai untuk aplikasi yang digerakkan tali pinggang. Motor berkelajuan tetap ini digunakan dalam aplikasi industri dan automotif seperti alat mesin dan mesin penggulungan / penggulungan di mana diperlukan ketepatan tork yang banyak.
Motor Kompaun DC
Motor kompaun DC merangkumi medan shunt teruja yang terpisah yang mempunyai tork permulaan yang sangat baik namun menghadapi masalah dalam aplikasi kelajuan berubah. Medan di motor ini dapat dihubungkan secara bersiri melalui angker serta medan shunt yang teruja secara berasingan. Medan seri memberikan tork permulaan yang unggul sedangkan medan shunt memberikan pengaturan kecepatan yang lebih baik. Tetapi, medan siri menyebabkan masalah kawalan dalam aplikasi pemacu kelajuan berubah & biasanya tidak digunakan dalam pemacu 4-kuadran.
Teruja Teruja
Seperti namanya, gulungan medan sebaliknya gegelung diaktifkan melalui sumber DC yang berasingan. Fakta unik motor ini adalah bahawa arus angker tidak membekalkan seluruh belitan medan, kerana belitan medan diperkuat dari sumber arus DC luaran yang terpisah. Persamaan tork motor DC adalah Tg = Ka φ Ia, Dalam kes ini, tork diubah melalui perubahan fluks terfail ‘φ’ & bebas dari arus angker ‘Ia’.
Diri Teruja
Seperti namanya, pada motor jenis ini, arus dalam belitan dapat dibekalkan melalui motor sebaliknya mesin itu sendiri. Selanjutnya, motor ini dipisahkan menjadi motor seri dan luka-luka.
Motor DC Magnet Kekal
Motor DC magnet PMDC atau kekal termasuk belitan angker. Motor ini direka dengan magnet kekal dengan meletakkannya di margin dalam teras stator untuk menghasilkan fluks medan. Sebaliknya, rotor merangkumi armature DC konvensional termasuk berus & segmen komutator.
Dalam motor DC magnet kekal, medan magnet dapat dibentuk melalui magnet kekal. Jadi, arus input tidak digunakan untuk pengujaan yang digunakan dalam penghawa dingin, pengelap, pemula kenderaan, dll.
Menyambungkan Motor DC dengan Mikrokontroler
Pengawal mikro tidak dapat menggerakkan motor secara langsung. Oleh itu, kita memerlukan beberapa jenis pemandu untuk mengawal kelajuan dan arah motor. Pemacu motor akan bertindak sebagai alat penghubung antara mikrokontroler dan motor . Pemacu motor akan bertindak sebagai penguat arus kerana mereka mengambil isyarat kawalan arus rendah dan memberikan isyarat arus tinggi. Isyarat arus tinggi ini digunakan untuk menggerakkan motor. Menggunakan cip L293D adalah cara mudah untuk mengawal motor menggunakan mikrokontroler. Ia mengandungi dua litar pemacu jambatan H secara dalaman.
Cip ini direka untuk mengawal dua motor. L293D mempunyai dua set susunan di mana 1 set mempunyai input 1, input 2, output1, output 2, dengan pin aktif sementara satu set lain mempunyai input 3, input 4, output 3, output 4 dengan pin aktif lain. Berikut adalah video yang berkaitan dengan L293D
Berikut adalah contoh motor DC yang dihubungkan dengan mikrokontroler L293D.

Motor DC dihubungkan dengan mikrokontroler L293D
L293D mempunyai dua set susunan di mana satu set mempunyai input 1, input 2, output 1, dan output 2 dan satu set lain mempunyai input 3, input 4, output 3, dan output 4, menurut rajah di atas,
- Sekiranya pin no 2 dan 7 tinggi maka pin no 3 dan 6 juga tinggi. Sekiranya diaktifkan 1 dan nombor pin 2 tinggi meninggalkan pin nombor 7 rendah maka motor berputar ke arah hadapan.
- Sekiranya diaktifkan 1 dan nombor pin 7 tinggi tinggalkan pin nombor 2 rendah maka motor berputar ke arah terbalik.
Kini motor dc masih terdapat dalam banyak aplikasi sekecil mainan dan pemacu cakera atau dalam saiz besar untuk mengoperasikan mesin penggelek keluli dan mesin kertas.
Persamaan Motor DC
Besarnya fluks yang dialami adalah
F = BlI
Di mana, B- Flux density disebabkan fluks yang dihasilkan oleh belitan medan
l- Panjang aktif konduktor
I-Arus yang melalui konduktor
Semasa konduktor berputar, EMF diinduksi yang bertindak ke arah yang bertentangan dengan voltan yang dibekalkan. Ia diberikan sebagai

Di mana, Ø- Fluz kerana belitan medan
P- Bilangan tiang
Pemalar A-A
N - Kelajuan motor
Z- Bilangan pengalir
Voltan bekalan, V = Eb+ SayakeRke
Tork yang dikembangkan adalah
 Oleh itu daya kilas berkadar terus dengan arus angker.
Oleh itu daya kilas berkadar terus dengan arus angker.
Juga, kelajuan berbeza dengan arus angker, oleh itu secara tidak langsung tork dan kelajuan motor saling bergantung antara satu sama lain.
Untuk motor DC shunt, kelajuan tetap hampir berterusan walaupun tork meningkat dari tanpa beban ke beban penuh.
Untuk motor siri DC, kelajuan menurun apabila tork meningkat dari tanpa beban ke beban penuh.
Oleh itu tork dapat dikawal dengan mengubah kelajuan. Kawalan kelajuan dicapai sama ada dengan
- Mengubah fluks dengan mengawal arus melalui penggulungan medan- Flux Control kaedah. Dengan kaedah ini, kelajuan dikawal melebihi kelajuannya.
- Armature Voltage Control - Menyediakan kawalan kelajuan di bawah kelajuan normalnya.
- Kawalan Voltan Bekalan - Menyediakan kawalan kelajuan di kedua arah.
4 Operasi Kuadran
Secara amnya, sebuah motor boleh beroperasi di 4 kawasan yang berbeza. The operasi empat kuadran motor dc merangkumi perkara berikut.
- Sebagai motor ke arah hadapan atau arah jam.
- Sebagai penjana ke arah hadapan.
- Sebagai motor dalam arah terbalik atau berlawanan arah jam.
- Sebagai penjana ke arah terbalik.

4 Operasi Kuadran Motor DC
- Pada kuadran pertama, motor menggerakkan beban dengan kelajuan dan tork ke arah positif.
- Pada kuadran kedua, arah tork berpusing dan motor bertindak sebagai penjana
- Pada kuadran ketiga, motor menggerakkan beban dengan kelajuan dan tork ke arah negatif.
- Dalam 4ikakuadran, motor bertindak sebagai penjana dalam mod terbalik.
- Pada kuadran pertama dan ketiga, motor bertindak pada arah maju dan belakang. Sebagai contoh, motor di kren untuk mengangkat beban dan juga meletakkannya.
Pada kuadran kedua dan keempat, motor bertindak sebagai penjana ke arah maju dan mundur masing-masing, dan memberikan tenaga kembali ke sumber kuasa. Oleh itu, cara untuk mengawal operasi motor, menjadikannya beroperasi di mana-mana 4 kuadran adalah dengan mengawal kelajuan dan arah putarannya.
Kelajuan dikawal sama ada dengan mengubah voltan angker atau melemahkan medan. Arah putaran atau arah putaran dikawal dengan mengubah sejauh mana voltan yang digunakan lebih besar daripada atau kurang daripada emf belakang.
Kesalahan Biasa pada Motor DC
Penting untuk mengetahui serta memahami kegagalan & kesalahan motor untuk menerangkan alat keselamatan yang paling sesuai untuk setiap kes. Terdapat tiga jenis kegagalan motor seperti mekanikal, elektrikal & mekanikal yang tumbuh menjadi elektrikal. Kegagalan yang paling kerap berlaku termasuk yang berikut,
- Pecahan penebat
- Terlalu panas
- Beban berlebihan
- Gagal menanggung
- Getaran
- Rotor Berkunci
- Ketidakseimbangan Poros
- Berlari Berbalik
- Ketidakseimbangan fasa
Kesalahan yang paling biasa berlaku di motor AC, dan juga motor DC, termasuk yang berikut.
- Apabila motor tidak dipasang dengan betul
- Apabila motor tersekat melalui kotoran
- Apabila motor mengandungi air
- Semasa motor terlalu panas
Motor DC 12 V
Motor DC 12v murah, kecil dan kuat yang digunakan dalam beberapa aplikasi. Memilih motor DC yang sesuai untuk aplikasi tertentu adalah tugas yang mencabar, jadi sangat penting untuk bekerja melalui syarikat yang tepat. Contoh terbaik motor ini adalah METMotors, kerana mereka membuat motor PMDC (magnet kekal DC) dengan kualiti tinggi selama lebih dari 45 tahun.
Bagaimana Memilih Motor yang Betul?
Pemilihan motor 12v dc dapat dilakukan dengan mudah melalui METmotors kerana profesional syarikat ini akan terlebih dahulu mempelajari aplikasi anda yang betul dan selepas itu mereka mempertimbangkan banyak ciri serta spesifikasi untuk menjamin anda menyelesaikan dengan produk terbaik.
Voltan operasi adalah salah satu ciri motor ini.
Setelah motor digerakkan oleh bateri, voltan operasi rendah biasanya dipilih kerana lebih sedikit sel diperlukan untuk mendapatkan voltan tertentu. Tetapi, pada voltan tinggi, memandu motor dc biasanya lebih cekap. Walaupun begitu, operasinya dapat dicapai dengan 1.5 volt sehingga 100V. Motor yang paling kerap digunakan ialah 6v, 12v & 24v. Spesifikasi utama motor ini adalah kelajuan, arus operasi, kuasa & tork.
Motor 12V DC sangat sesuai untuk aplikasi yang berbeza melalui bekalan DC yang memerlukan tork berjalan dan permulaan yang tinggi. Motor ini beroperasi pada kelajuan yang lebih sedikit berbanding dengan voltan motor yang lain.
Keistimewaan motor ini berbeza-beza berdasarkan syarikat pembuatan dan juga aplikasi.
- Kelajuan motor adalah 350rpm hingga 5000 rpm
- Tork dinilai motor ini berkisar antara 1.1 hingga 12.0 in-lbs
- Kuasa output motor ini berkisar antara 01hp hingga.21 hp
- Ukuran bingkai 60mm, 80mm, 108 mm
- Berus yang boleh diganti
- Hayat sikat biasa ialah 2000+ jam
Kembali EMF di DC Motor
Setelah konduktor yang membawa arus disusun dalam medan magnet, maka daya kilas akan mendorong ke atas konduktor dan tork akan memutar konduktor yang memotong fluks medan magnet. Berdasarkan fenomena induksi Elektromagnetik setelah konduktor memotong medan magnet, dan kemudian EMF akan mendorong dalam konduktor.
Arah EMF yang disebabkan dapat ditentukan melalui peraturan kanan Flemming. Menurut peraturan ini, jika kita mencengkam gambar kecil, telunjuk, dan jari tengah kita dengan sudut 90 °, setelah itu jari telunjuk akan menandakan jalan medan magnet. Di sini, jari ibu jari menunjukkan cara pergerakan konduktor & jari tengah menunjukkan EMF yang disebabkan oleh konduktor.
Dengan menerapkan peraturan Flemming di sebelah kanan, kita dapat melihat bahawa arah emf yang diinduksi terbalik kepada voltan yang dikenakan. Jadi emf dipanggil emf belakang atau emf kaunter. Perkembangan emf belakang dapat dilakukan secara berturut-turut melalui voltan yang dikenakan, namun terbalik arah, iaitu emf belakang menahan arus arus yang menyebabkannya.
Besaran emf belakang dapat diberikan melalui ungkapan yang serupa seperti yang berikut.
Eb = NP ϕZ / 60A
Di mana
'Eb' adalah EMF yang disebabkan oleh motor yang disebut Back EMF
‘A’ adalah no. lorong selari di seluruh angker di antara berus polaritas terbalik
‘P’ adalah no. tiang
‘N’ adalah kelajuan
‘Z’ adalah jumlah keseluruhan konduktor dalam angker
‘Φ’ adalah aliran yang berguna untuk setiap tiang.
Dalam litar di atas, magnitud emf belakang selalu rendah berbanding dengan voltan yang dikenakan. Jurang perbezaan di antara keduanya hampir sama apabila motor dc berfungsi di bawah keadaan biasa. Arus akan berlaku pada motor dc kerana bekalan utama. Hubungan antara bekalan utama, EMF belakang & arus angker dapat dinyatakan sebagai Eb = V - IaRa.
Aplikasi untuk Mengawal Operasi Motor DC dalam 4 Kuadran
Pengendalian operasi motor DC dalam 4 kuadran dapat dicapai dengan menggunakan Mikrokontroler yang dihubungkan dengan 7 suis.

4 Kawalan Kuadran
Kes1: Apabila suis mula dan mengikut arah jam ditekan, logik dalam Mikrokontroler memberikan output logik rendah ke pin 7 dan logik tinggi ke pin2, menjadikan motor berputar mengikut arah jam dan beroperasi di 1stkuadran. Kelajuan motor dapat berubah-ubah dengan menekan suis PWM, yang menyebabkan penerapan denyut berdurasi dengan pin pengaktifan IC pemacu, sehingga mengubah voltan yang berlaku.
Kes 2: Apabila brek ke depan ditekan, logik Mikrokontroler menggunakan logik rendah ke pin7 dan logik tinggi ke pin 2 dan motor cenderung beroperasi pada arah terbalik, menyebabkannya berhenti serta-merta.
Dengan cara yang sama, menekan suis berlawanan arah jam menyebabkan motor bergerak ke arah terbalik, iaitu beroperasi di 3rdkuadran, dan menekan suis brek terbalik menyebabkan motor berhenti serta-merta.
Oleh itu, melalui pengaturcaraan mikrokontroler yang betul dan melalui suis, operasi motor dapat dikendalikan pada setiap arah.
Oleh itu, ini adalah mengenai gambaran keseluruhan motor DC. The kelebihan motor dc adakah mereka menyediakan kawalan kelajuan yang sangat baik untuk pecutan dan perlambatan, reka bentuk yang mudah difahami, dan reka bentuk pemacu yang mudah dan murah. Berikut adalah soalan untuk anda, apakah kelemahan motor DC?
Kredit Foto:
- Motor DC Brushless Bekerja oleh berita.softpedia
- 4 Operasi Kuadran Motor DC oleh lh5.ggpht
- Motor DC diarahkan oleh wikimedia
- Shunt Motor oleh Zon






{kind=link}
{kind=link}
{kind=link}
{kind=link}