Dalam 3-Φ Induksi motor , stator motor akan menghasilkan medan magnet berputar atau RMF kerana peralihan fasa dengan 120 darjah dalam input bekalan 3- Φ. Jadi RMF berputar dengan stator kelajuannya sendiri yang dikenali sebagai kelajuan segerak dan dilambangkan dengan 'Ns'. Medan magnet berputar (RMF) bercakap dengan rotor kerana perubahan fluks boleh menyebabkan emf. Jadi rotor di motor mula berputar dengan kelajuan yang dikenali sebagai kelajuan sebenar (N). Perbezaan utama antara kelajuan segerak & sebenar dikenali sebagai SLIP. Nilai slip sama dengan ‘1’ kerana rotor pada motor dalam keadaan rehat & tidak akan bersamaan dengan ‘0’. Oleh itu, semasa mengoperasikan motor, kelajuan segerak tidak bersamaan dengan ‘N’ iaitu, kelajuan sebenar dalam masa tertentu. Artikel ini membincangkan gambaran keseluruhan mengenai slip pada motor aruhan.
Apakah Slip dalam Motor Induksi?
Definisi: Dalam Motor Induksi, slip adalah kelajuan di antara fluks magnet berputar dan juga rotor yang dinyatakan dalam sebutan bagi setiap kelajuan segerak unit. Ia dapat diukur tanpa dimensi & nilai motor ini tidak boleh sifar.

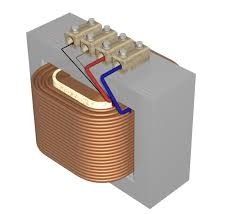
Induksi motor
Sekiranya kelajuan segerak fluks magnetik berputar & kelajuan pemutar adalah Ns & Nr motor , maka kelajuan di antara mereka boleh setara dengan (Ns - Nr). Jadi, slip boleh ditentukan sebagai
S = (Ns - Nr) / Ns
Di sini, kelajuan pemutar dan kelajuan segerak tidak setara (Nr Di motor ini, jika bekalan kuasa diberikan kepada 3 fasa penggulungan stator adalah 3 fasa, maka medan magnet berputar dapat dihasilkan dalam jurang udara sehingga ini dikenali sebagai kelajuan segerak. Kelajuan ini dapat ditentukan dengan no. tiang serta kekerapan bekalan kuasa . Di sini kutub dan frekuensi dilambangkan dengan P&S. Kelajuan segerak (N) = 2f / Prps (Di sini, rps adalah revolusi untuk setiap saat). Medan magnet ini yang berputar akan memotong pemutar yang tidak aktif konduktor untuk menghasilkan e.m.f. Kerana litar pemutar akan litar pintas, dan emf yang dihasilkan akan menaikkan bekalan rotor semasa. Antara muka antara arus pemutar & fluks magnet berputar dapat menghasilkan daya kilas. Oleh itu, menurut undang-undang Lenz, rotor mula berpusing ke arah medan magnet berputar. Akibatnya, kelajuan relatif setara dengan (Ns - Nr) dan diatur di antara mereka untuk menyebabkan tergelincir di dalam motor. Kepentingan slip pada motor aruhan boleh dibincangkan di bawah berdasarkan nilai-nilai slip kerana tingkah laku motor bergantung terutamanya pada nilai slip. slip-ring-in-induction-motor Sekiranya nilai slip adalah '0' maka kelajuan pemutar bersamaan dengan fluks magnet berputar. Oleh itu, tidak ada pergerakan di antara gegelung pemutar dan juga fluks magnet berputar. Jadi, tidak ada tindakan pemotongan fluks pada gegelung pemutar. Oleh itu, emf tidak akan dihasilkan dalam gegelung pemutar untuk menghasilkan arus pemutar. Jadi motor ini tidak akan berfungsi. Oleh itu, penting untuk mempunyai nilai slip positif pada motor ini dan kerana alasan ini, slip tidak akan menjadi ‘0’ pada motor induksi. Sekiranya nilai slip adalah '1' maka rotor di motor akan berhenti Sekiranya nilai gelincir adalah ‘-1’ maka kelajuan pemutar pada motor lebih setanding dengan fluks magnet berputar yang segerak. Jadi, ini hanya mungkin apabila pemutar di dalam motor dipusingkan ke arah fluks magnet berputar menggunakan penggerak utama Ini hanya mungkin dilakukan apabila pemutar dipusingkan ke arah fluks magnet berputar oleh beberapa penggerak utama. Dalam keadaan ini, motor beroperasi sebagai penjana aruhan. Sekiranya nilai slip motor lebih besar daripada satu maka pemutar akan berpusing ke arah yang berlawanan dengan revolusi fluks magnet. Oleh itu, jika fluks magnet berputar mengikut arah pusingan jam, maka pemutar akan berpusing berpusing ke arah lawan arah jam. Jadi, kelajuan di antara mereka akan seperti (Ns + Nr). Dalam pengereman atau Pemasangan motor ini, slip lebih besar daripada ‘1’ dicapai untuk membawa putaran motor dengan cepat dalam keadaan rehat. The formula slip pada motor aruhan diberikan di bawah. Slip = (Ns-Nr / Ns) * 100 Dalam persamaan di atas, ‘Ns’ adalah kelajuan segerak dalam rpm sedangkan ‘Nr’ adalah kelajuan putaran dalam rpm (revolusi untuk setiap saat) Sekiranya kelajuan segerak motor adalah 1250 dan kelajuan sebenar adalah 1300, sila dapatkan slip di motor? Nr = 1250 rpm Ns = 1300 rpm Perbezaan kelajuan dapat dikira sebagai Nr-Ns = 1300-1250 = 50 Formula untuk mencari slip pada motor adalah (Nr-ns) * 100 / Ns = 50 * 100/1300 = 3.84% Semasa merancang motor aruhan, mengukur slip adalah penting. Untuk itu, formula di atas digunakan untuk memahami cara mendapatkan perbezaan serta peratusan slip. Hubungan antara tork dan slip dalam motor induksi memberikan lekukan dengan maklumat mengenai perbezaan tork menggunakan slip. Penyimpangan slip dicapai dengan perbezaan perubahan kelajuan & daya kilas bersamaan dengan kelajuan itu juga akan berbeza. hubungan-antara-tork-dan-slip-in-induction-motor Lengkung didefinisikan dalam tiga mod seperti motor, menghasilkan brek dan ciri-ciri slip tork dibahagikan kepada tiga kawasan seperti slip rendah, slip tinggi, dan slip sederhana. Dalam mod ini, setelah bekalan diberikan kepada stator, maka motor mula berpusing di bawah segerak. Tork motor ini akan berubah apabila slip berubah dari ‘0’ menjadi ‘1’. Pada keadaan tanpa beban, ia adalah sifar sedangkan, dalam keadaan beban, adalah satu. Dari lekukan di atas, kita dapat melihat bahawa torknya berkadar langsung dengan slip. Apabila slip lebih banyak, maka semakin banyak daya kilas akan dihasilkan. Dalam mod ini, motor berjalan lebih tinggi daripada kelajuan segerak. Penggulungan stator disambungkan ke bekalan 3-Φ di mana ia memberikan tenaga elektrik. Sebenarnya, motor ini mendapat tenaga mekanikal kerana kedua-dua tork dan slipnya negatif dan memberikan tenaga elektrik. Motor aruhan berfungsi dengan menggunakan daya reaktif sehingga tidak digunakan sebagai penjana . Kerana, daya reaktif mesti disediakan dari luar dan ia berfungsi di bawah kelajuan segerak, maka ia menggunakan tenaga elektrik dan bukannya memberikan pada output. Jadi, secara amnya, aruhan penjana dielakkan. Dalam mod ini, bekalan voltan kekutuban diubah. Oleh itu motor aruhan mula berputar ke arah yang bertentangan sehingga motor berhenti berpusing. Kaedah seperti ini dapat digunakan bila-bila masa diperlukan untuk mematikan motor dalam jangka masa yang kurang. Apabila motor mula berputar, maka beban akan memecut dalam arah yang serupa sehingga kelajuan motor dapat ditingkatkan di atas kelajuan segerak. Dalam mod ini, ia berfungsi seperti penjana induksi yang disediakan tenaga elektrik ke sesalur sehingga mengurangkan kelajuan motor dibandingkan dengan kelajuan segerak. Akibatnya, motor berhenti berfungsi. Prinsip pemecahan seperti ini dikenali sebagai pemecahan dinamik sebaliknya pemutus regeneratif. Oleh itu, ini semua berkaitan gambaran keseluruhan mengenai slip pada motor aruhan . Apabila kelajuan pemutar di dalam motor bersamaan dengan kelajuan segerak maka slip adalah ‘0’. Sekiranya pemutar berputar pada kelajuan segerak dalam arah medan magnet berputar, maka tidak ada tindakan pemotongan fluks, tidak ada emf dalam konduktor pemutar & tidak ada aliran arus di dalam konduktor bar pemutar. Oleh itu, tork elektromagnetik tidak dapat dikembangkan. Oleh itu pemutar motor ini tidak dapat mencapai kelajuan segerak. Akibatnya, slip sama sekali tidak sifar di dalam motor. Inilah soalan untuk anda, apa yang saya
Kepentingan Slip dalam Motor Induksi

Apabila Nilai Slip adalah '0'
Apabila Nilai Slip adalah '1'
Apabila Nilai Slip adalah '-1'
Apabila Nilai Slip adalah> 1
Formula
Sebagai contoh
Hubungan antara Tork dan Slip-in Motor Induksi

Mod Permotoran
Mod Penjanaan
Mod Brek