Dalam projek ini kita akan belajar bagaimana membuat litar pemacu motor stepper unipolar sederhana menggunakan IC timer 555. Selain dari 555 timer, kami juga memerlukan IC CD 4017 yang merupakan IC counter dekad.
Oleh Ankit Negi
Mana-mana motor unipolar dapat disambungkan ke litar ini untuk melakukan tugas tertentu, walaupun anda perlu melakukan beberapa perubahan kecil terlebih dahulu.
Kelajuan motor stepper dapat dikawal dari potensiometer yang dihubungkan antara debit dan ambang pin pemasa 555 .
Asas Motor Stepper
Motor stepper digunakan di kawasan di mana jumlah putaran tertentu diperlukan, tidak dapat dicapai dengan menggunakan motor d.c biasa. Aplikasi khas motor stepper adalah dalam PRINTER 3D. Anda akan menemui dua jenis motor stepper yang popular: UNIPOLAR dan BIPOLAR.
Seperti namanya motor stepper unipolar mengandungi belitan dengan wayar biasa yang dapat dihidupkan dengan mudah satu persatu.
Manakala motor stepper bipolar tidak mempunyai terminal yang sama antara gegelung kerana ia tidak dapat digerakkan hanya dengan menggunakan litar yang dicadangkan. Untuk menggerakkan motor stepper bipolar kita memerlukan litar jambatan h.
KOMPONEN:
1. 555 IC PEMASA

dua. CD 4017 IC

3. RESISTOR 4.7K, 1K


4. POTENTIOMETER 220K

5. 1 KAPASITOR

6. 4 DIOD 1N4007

7. 4 TRANSISTOR 2N2222

8. UNIPOLAR STEPPER MOTOR

9. SUMBER KUASA DC
TUJUAN 555 MASA:
Pemasa 555 diperlukan di sini untuk menghasilkan denyutan jam frekuensi tertentu (boleh diubah menggunakan pot 220k) yang menentukan kelajuan motor stepper.
Maklumat Pinout IC 555

TUJUAN CD4017:
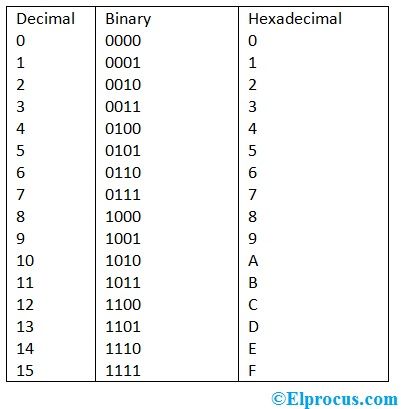
Seperti yang telah disebutkan di atas, ini adalah IC penghitung dekad, ia boleh menghitung hingga 10 denyutan jam. Apa yang menjadikan IC ini istimewa ialah ia mempunyai penyahkod dalamannya sendiri. Oleh kerana itu anda tidak perlu menambahkan IC tambahan untuk menyahkod nombor binari.
4017 mengira hingga 10 denyutan jam dari 555 jam dan memberikan output tinggi yang sepadan dengan setiap denyutan jam satu demi satu dari 10 pin outputnya. Pada satu masa hanya satu pin tinggi.
TUJUAN TRANSISTOR:
Terdapat dua tujuan transistor di sini:
1. Transistor bertindak seperti suis di sini, dengan itu memberi tenaga satu gegelung pada satu masa.
2. Transistor membolehkan arus tinggi melaluinya dan kemudian motor, sehingga tidak termasuk pemasa 555 sepenuhnya kerana dapat membekalkan arus yang sangat sedikit.
RAJAH LITAR:

Buat sambungan seperti dalam rajah.
1. Sambungkan pin 3 atau pin output pemasa 555 ke pin 14 (pin jam) IC 4017.
2. Sambungkan pin aktif atau pin ke-13 4017 ke tanah.
3. Sambungkan pin masing-masing 3,2,4,7 satu demi satu ke transistor 1,2,3,4.
4. Sambungkan pin 10 dan 15 ke tanah melalui perintang 1k.
5. Sambungkan wayar motor stepper biasa ke positif bekalan.
6. Sambungkan wayar motor stepper lain sedemikian rupa sehingga gegelung dihidupkan satu demi satu untuk menyelesaikan satu revolusi penuh dengan betul. (Anda dapat melihat lembaran data motor yang disediakan oleh pengeluar)
MENGAPA PIN OUTPUT 10 DARI IC 4017 DIHUBUNGKAN KE PIN 15 (RESET PIN)?
Seperti yang telah disebutkan di atas 4017 mengira denyutan jam satu demi satu hingga denyut jam ke-10 dan memberikan output yang tinggi pada pin output dengan sewajarnya, setiap pin output naik tinggi.
Ini menyebabkan kelewatan putaran motor yang tidak diperlukan. Oleh kerana kita hanya memerlukan empat pin pertama untuk satu revolusi motor lengkap atau empat nombor perpuluhan pertama dari o hingga 3, pin no. 10 disambungkan ke pin15 sehingga selepas kiraan ke-4 IC diset semula dan pengiraan bermula dari awal lagi. Ini memastikan tiada gangguan dalam putaran motor.
KERJA:
Setelah membuat sambungan dengan betul jika anda menghidupkan motor litar akan mula berputar secara berperingkat. Pemasa 555 menghasilkan denyutan jam bergantung pada nilai perintang, potensiometer dan kapasitor.
Sekiranya anda menukar nilai mana-mana tiga komponen ini frekuensi denyut jam akan berubah.
Denyutan jam ini diberikan kepada IC CD 4017 yang kemudian mengira denyutan jam satu demi satu dan memberikan 1 sebagai output ke pin no 3,2,4,7 masing-masing dan mengulangi proses ini secara berterusan.
Oleh kerana transistor Q1 disambungkan ke pin 3, transistor dihidupkan terlebih dahulu kemudian transistor Q2 diikuti oleh Q3 dan Q4. Tetapi apabila satu transistor dihidupkan, semua yang lain tetap mati.
Apabila Q1 dihidupkan ia berfungsi seperti suis tertutup dan arus mengalir melalui wayar biasa ke wayar 1 dan kemudian ke tanah melalui transistor Q1.
Ini memberi tenaga pada gegelung 1 dan motor berputar pada beberapa sudut yang bergantung pada frekuensi jam. Kemudian perkara yang sama berlaku dengan Q2 yang memberi tenaga pada gegelung 2 diikuti oleh gegelung 3 dan gegelung 4. Oleh itu satu revolusi lengkap diperolehi.
Apabila potensiometer diputar:
Katakan pada awalnya kedudukan periuk sedemikian rupa sehingga terdapat rintangan maksimum (220k) antara pelepasan dan pin ambang. Formula untuk frekuensi denyut jam output adalah:
F = 1.44 / (R1 + 2R2) C1
Jelas dari formula bahawa frekuensi denyutan jam menurun ketika nilai R2 meningkat. Oleh itu, apabila nilai R2 atau periuk maksimum, frekuensi minimum kerana IC 4017 dikira lebih perlahan dan memberikan output yang lebih lambat.
Apabila nilai rintangan R2 menurun, frekuensi meningkat yang menyebabkan kelewatan minimum antara output IC 4017. Oleh itu motor stepper berputar lebih pantas.
Oleh itu nilai potensiometer menentukan kelajuan motor stepper.
VIDEO SIMULASI:
Di sini anda dapat melihat dengan jelas bagaimana kelajuan motor berbeza dengan rintangan R2. Nilainya mula-mula diturunkan dan kemudian meningkat yang seterusnya bertambah dan kemudian menurunkan kelajuan motor stepper.
Sebelumnya: Bagaimana Lampu suluh Crank Berfungsi Seterusnya: Arduino Tachometer Circuit untuk bacaan yang tepat