Robot pick and place adalah robot yang digunakan untuk mengambil objek dan meletakkannya di lokasi yang diinginkan. Ia boleh menjadi robot silinder yang memberikan pergerakan dalam paksi mendatar, menegak dan putaran, robot sfera yang memberikan dua gerakan putaran dan satu linear, robot artikulasi atau robot scara (robot tetap dengan 3 lengan putar paksi menegak).
Kelebihan
Sebelum melangkah lebih jauh, mari kita lihat beberapa alasan mengapa memilih dan meletakkan robot lebih disukai:
- Mereka lebih pantas dan dapat menyelesaikan kerja dalam beberapa saat berbanding rakan sejawatnya.
- Mereka fleksibel dan mempunyai reka bentuk yang sesuai.
- Mereka tepat.
- Mereka meningkatkan keselamatan persekitaran kerja dan sebenarnya tidak pernah jemu.
Bahagian Robot Pick N Place

Pilih Robot Tempat N
Mari kita lihat apa sebenarnya robot pilihan dan tempat:
- Untuk Rover : Ini adalah badan utama robot yang terdiri daripada beberapa badan kaku seperti silinder atau sfera, sendi dan pautan. Ia juga dikenali sebagai manipulator.
- Penguat Akhir : Ini adalah badan yang disambungkan ke sendi terakhir rover yang digunakan untuk tujuan mencengkam atau mengendalikan objek. Ia boleh menjadi analogi bagi lengan manusia.
- Penggerak : Mereka adalah pemandu robot. Ia sebenarnya menggerakkan robot. Ia boleh berupa motor seperti motor servo, motor stepper atau silinder pneumatik atau hidraulik.
- Sensor: Mereka digunakan untuk merasakan keadaan dalaman dan luaran untuk memastikan robot berfungsi dengan lancar secara keseluruhan. Sensor melibatkan sensor sentuh, sensor IR dll.
- Pengawal : Ia digunakan untuk mengawal penggerak berdasarkan maklum balas sensor dan seterusnya mengawal pergerakan setiap sendi dan akhirnya pergerakan efektor akhir.
Mengendalikan Robot Pick N Place Asas:
Fungsi asas a memilih dan meletakkan robot dilakukan oleh sambungannya. Sendi serupa dengan sendi manusia dan digunakan untuk bergabung dengan dua badan kaku berturut-turut dalam robot. Mereka boleh menjadi sendi putar atau sendi linear. Untuk menambahkan sambungan pada mana-mana pautan robot, kita perlu mengetahui tentang tahap kebebasan dan tahap pergerakan untuk bahagian badan itu. Darjah kebebasan melaksanakan pergerakan linier dan putaran badan dan Darjah pergerakan menyiratkan bilangan paksi yang dapat digerakkan oleh badan.

Robot Pick N Place yang Mudah
Robot memilih dan meletakkan yang ringkas terdiri daripada dua badan kaku pada pangkalan yang bergerak, dihubungkan bersama dengan sendi putar. Sendi putar adalah satu yang memberikan putaran dalam 360 darjah di sekitar salah satu paksi.
- Bahagian bawah atau pangkal dipasang dengan roda yang memberikan pergerakan linier.
- Yang 1stbadan tegar terpaku dan menyokong badan tegar kedua yang disediakan untuk kesan akhir.
- Yang 2ndbadan kaku dibekalkan dengan pergerakan di ketiga paksi dan mempunyai 3 darjah kebebasan. Ia disambungkan ke 1stbadan dengan sendi putaran.
- Pengaruh akhir harus menampung semua darjah 6 kebebasan, untuk mencapai semua sisi komponen, untuk mengambil kedudukan ke ketinggian apa pun.
Secara keseluruhan, robot memilih dan meletakkan asas berfungsi seperti berikut:
- Roda di bawah pangkalan membantu menggerakkan robot ke lokasi yang diinginkan.
- Badan tegar yang menyokong efektor akhir membongkok atau meluruskan ke atas untuk mencapai kedudukan di mana objek diletakkan.
- Pengaruh akhir mengambil objek dengan cengkaman kuat dan meletakkannya pada kedudukan yang dikehendaki.
Sekarang setelah kita mendapat idea ringkas mengenai robot pilih dan letakkan, persoalan asasnya ialah bagaimana ia dikendalikan.
Robot memilih dan tempat yang mudah dapat dikawal dengan mengawal pergerakan efektor akhirnya. Gerakan tersebut dapat menggunakan gerakan hidraulik, yaitu menggunakan cairan hidraulik di bawah tekanan untuk menggerakkan robot, atau menggunakan gerakan pneumatik, yaitu menggunakan udara bertekanan untuk menyebabkan gerakan mekanik. Namun cara yang paling berkesan adalah menggunakan motor untuk memberikan gerakan yang diperlukan. Motor harus dikawal untuk memberikan gerakan yang diperlukan kepada robot dan efektor akhir.
Contoh Kerja Mengendalikan Robot Pick N Place
Bagaimana mengendalikan robot dengan hanya beberapa butang pada papan kekunci? Ya, mungkin! Hanya dengan menekan butang yang diperlukan, kita dapat mengirimkan perintah ke robot untuk membuatnya bergerak ke arah mana pun untuk mencapai tugas kita. Lebih-lebih lagi ini dapat dicapai dengan menggunakan komunikasi tanpa wayar yang sederhana.
Mari lihat bagaimana sebenarnya ini berfungsi:
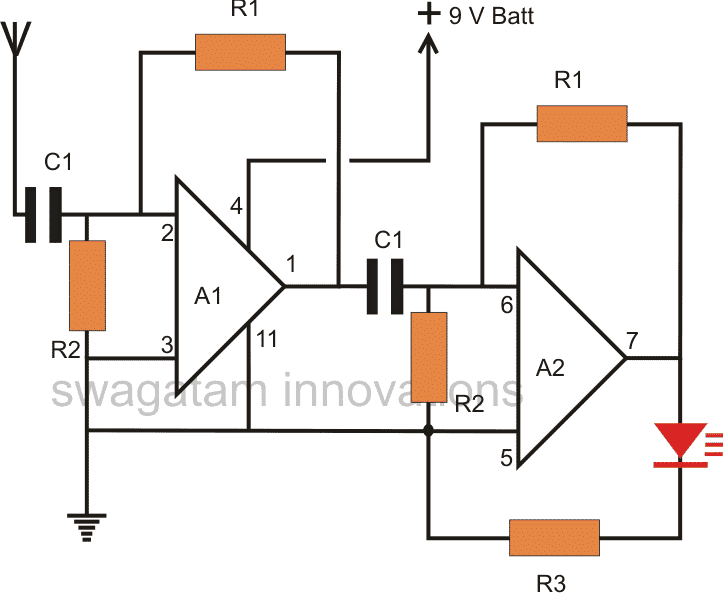
Bahagian pemancar terdiri daripada pad kekunci yang dihubungkan ke mikrokontroler. Mana-mana nombor butang dalam format perpuluhan ditukar menjadi 4 digit binari oleh mikrokontroler dan output selari pada salah satu portnya digunakan pada pengekod. Pengekod mengubah data selari ini menjadi data bersiri dan ini dimasukkan ke pemancar, dilengkapi dengan antena untuk menghantar data bersiri.

Blok Diagram Menunjukkan Pemancar Robot Tempat P N
Bahagian penerima terdiri daripada penyahkod yang dihubungkan ke mikrokontroler. Decoder menukar perintah yang diterima dalam format bersiri ke bentuk selari dan memberikan data ini ke mikrokontroler. Berdasarkan arahan ini mikrokontroler mengirimkan isyarat input yang sesuai kepada pemandu motor untuk menggerakkan motor masing-masing.

Blok Diagram Menunjukkan Penerima Robot Pick N Place
Sistem ini terdiri daripada dua motor untuk memberikan gerakan ke seluruh robot dan dua motor lain untuk memberikan gerakan lengan. Pengaruh akhir atau pencengkam perlu dikawal untuk memberi tekanan yang tepat pada objek untuk mengatasinya dengan berkesan, untuk memberikannya cengkaman lembut . Ini dipastikan dengan mengawal motor lengan melalui perintah yang betul. Keluaran dari motor lengan disambungkan ke perintang 10Ohms / 2W dan pada masa motor melebihi keadaan beban atau terkunci, voltan tinggi dikembangkan di seluruh perintang, yang menyebabkan tahap logik tinggi pada output optoisolator dan gangguan pin mikrokontroler yang disambungkan ke output optoisolator melalui transistor pnp mendapat isyarat rendah logik, yang menghentikan semua operasi pencengkam lain.
Oleh itu, melalui komunikasi RF yang sederhana, kita sebenarnya dapat mengawal robot memilih dan meletakkan.
Aplikasi praktikal Robot Pick and Place:
- Aplikasi Pertahanan : Ini dapat digunakan untuk pengawasan dan juga untuk mengambil benda berbahaya seperti bom dan menyebarkannya dengan selamat.
- Aplikasi Industri : Robot ini digunakan dalam pembuatan, untuk mengambil bahagian yang diperlukan dan meletakkannya pada kedudukan yang betul untuk menyelesaikan lekapan mesin. Ia juga dapat digunakan untuk meletakkan objek di tali sawat serta mengambil produk yang rosak dari tali sawat.
- Aplikasi Perubatan : Robot ini boleh digunakan dalam pelbagai operasi pembedahan seperti operasi penggantian sendi, operasi pembedahan ortopedik dan dalaman. Ia menjalankan operasi dengan lebih tepat dan tepat.
Selain aplikasi ini, robot ini juga boleh digunakan dalam pelbagai aplikasi lain yang sesuai untuk manusia.
Sekarang persoalannya masih ada - Sejauh mana hari robot akan memudahkan jalan bagi manusia?