Pengenalan kepada Robot
Robot adalah mesin yang kelihatan seperti manusia. Itu telah diprogramkan untuk melakukan sesuatu. Kata Robot berasal dari perkataan Slavic robota (bermaksud buruh paksa). Robot ini dikembangkan pada tahun 1960-an. Robot diperbuat daripada logam dan pengadun unsur lain. Robot hanya memerintahkan dan apa yang manusia katakan. Tiga puluh tahun yang lalu robot adalah sesuatu dalam filem fiksyen sains. Tetapi hari ini robotik digunakan di banyak kawasan. Dan sangat penting untuk masa depan umat manusia. The teknologi robotik bertambah baik untuk membantu pertahanan negara, penjagaan kesihatan, pembuatan, keselamatan tanah air, pendidikan, barangan pengguna dan pelbagai sektor. Sudah doktor menggunakan robotik dalam pembedahan khas. Robot penting kerana ia melakukan tugas yang berbahaya dan mustahil dilakukan oleh manusia.
5 Sebab mengapa Robot popular
- Kepantasan
- Persekitaran berbahaya
- Tugas Berulang
- Kecekapan
- Ketepatan
Kelajuan:
Robot boleh digunakan kerana lebih pantas daripada orang semasa menjalankan tugas. Robot adalah mekanisme yang dikendalikan oleh komputer. Kita tahu bahawa komputer dapat melakukan pengiraan dan memproses data dengan pantas berbanding dengan manusia. Sebilangan robot sebenarnya bergerak dengan lebih pantas menjalankan tugas, seperti mengambil dan memasukkan barang, lebih cepat daripada manusia.
Persekitaran Berbahaya:
Robot boleh digunakan sebagai persekitaran yang berbahaya kerana dapat berfungsi di tempat manusia berada dalam bahaya. Sebagai contoh robot boleh dirancang untuk menahan lebih banyak haba, radiasi, asap kimia daripada yang manusia dapat.
Tugas Berulang:
Kadang-kadang robot tidak jauh lebih cepat daripada manusia, tetapi mereka pandai melakukan pekerjaan yang sama berulang kali. Ini mudah bagi robot, kerana setelah robot diprogramkan untuk melakukan pekerjaan sekali, program yang sama dapat dijalankan berkali-kali untuk melaksanakan tugas berkali-kali. Dan robot tidak akan merasa bosan seperti manusia.
Kecekapan:
Kecekapan adalah mengenai menjalankan tugas tanpa pembaziran. Ini bermaksud
- Tidak membuang masa
- Tidak membuang bahan
- Tidak membuang tenaga
Ketepatan:
Ketepatan adalah mengenai menjalankan tugas dengan tepat. Di kilang pembuatan barang, setiap item mesti dibuat sama. Ketika barang sedang dipasang, robot dapat meletakkan bahagian dalam pecahan milimeter.
Mengawal Robot
Robot asas atau sistem robot terdiri daripada badan kaku yang menempatkan seluruh litar robot. Litar terdiri daripada sensor yang merasakan perubahan persekitaran dan memberi maklumat ini ke unit kawalan.
Berdasarkan input dari sensor, unit kawalan sewajarnya mengawal penggerak. Oleh itu, operasi utama robot terletak pada unit kawalan. Dalam beberapa aplikasi, Robot sepenuhnya automatik, iaitu kawalan terletak di dalam peranti itu sendiri dan berdasarkan beberapa unit sensor, penggeraknya dikendalikan secara automatik oleh unit kawalan. Dalam beberapa aplikasi, robot dikendalikan secara manual.
Mari kita lihat dua cara untuk mengawal robot secara manual
- Menggunakan telefon bimbit
- Menggunakan alat kawalan jauh TV
Kenderaan Robotik Dikendalikan Telefon Bimbit:
Apabila kita bercakap mengenai kenderaan robot tanpa wayar , kita secara amnya memikirkan litar teknologi RF. Tetapi projek ini sangat berbeza. Ia menggunakan telefon bimbit untuk mengawal pergerakan kenderaan robot. Di sini kami telah menggunakan teknologi DTMF untuk mengawal kenderaan robot dengan menggunakan telefon bimbit. Kami menggunakan dua telefon bimbit, satu dihubungkan ke robot dan yang lain adalah telefon pengguna. Komunikasi terjalin di antara kedua telefon bimbit ini dan jika ada kekunci yang ditekan, nada itu terdengar ke ujung sel yang lain. Nada ini dipanggil nada 'dual tone multi frekuensi' (DTMF).

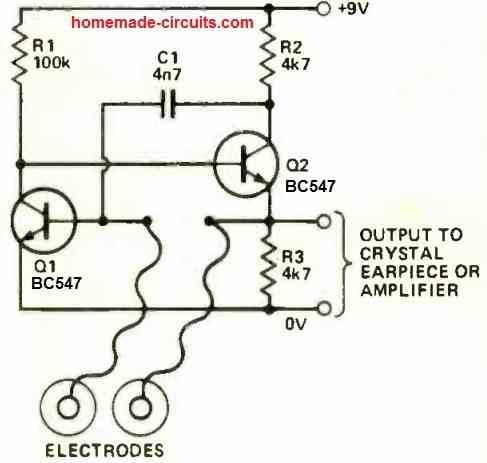
Kenderaan Robotik Dikawal Telefon Bimbit

Rajah Litar Kenderaan Robotik Terkawal Telefon bimbit
Projek ini dirancang untuk membangunkan a kenderaan robotik yang dikendalikan oleh telefon bimbit. Ini berdasarkan 8051 mikrokontroler. Kedua-dua telefon bimbit mengendalikan robot mengikut keperluan. Satu telefon bimbit disambungkan ke robot dan yang lain adalah sel pengguna. Apabila kekunci ditekan pada telefon bimbit pengguna yang menghasilkan nada yang sesuai, ia akan diterima di sel lain. Nada yang diterima diproses oleh mikrokontroler dengan bantuan penyahkod DTMF. Penyahkod menyahkod nada DTMF menjadi digit binari dan data berkod binari ini dihantar ke mikrokontroler. Berdasarkan input dari telefon bimbit, pengawal mikro memberikan isyarat yang tepat kepada pemandu motor untuk memutar setiap motor ke arah yang diinginkan. Sebagai contoh, dengan menekan nombor tertentu di telefon bimbit pengguna, panggilan secara automatik dipanggil ke telefon bimbit sistem. Sistem bergerak disambungkan ke penyahkod DTMF yang dengan sewajarnya menyahkod nada dan motor diputar ke arah yang sesuai dengan nombor yang ditekan.
Kenderaan Robotik yang dikawal oleh IR:
Dalam sistem ini terutamanya kenderaan robot dikendalikan oleh alat kawalan jauh TV. Sensor inframerah (IR) dihubungkan ke unit kawalan robot untuk merasakan isyarat jauh. Maklumat ini disampaikan kepada unit kawalan yang menggerakkan robot mengikut keperluan. Pengawal mikro digunakan sebagai sistem kawalan.
Di IR jarak jauh ini berfungsi sebagai pemancar. Titik apabila butang ditekan di alat kawalan jauh, isyarat akan dilalui dan diperoleh oleh penerima IR. Tanda ini dihantar ke mikrokontroler yang menyahkod isyarat dan melakukan pergerakan berkaitan seperti butang yang ditekan di alat kawalan jauh. Sebagai contoh, jika nombor 1 ditekan di remote, robot akan dibelok ke kiri sesuai dengan keperluan kita. Ujian usaha lain (maju, belakang dan kanan) akan dilakukan dengan cara perbandingan menggunakan IR. Pada akhir penerimaan pengembangan dicapai oleh dua motor yang dihubungkan ke mikrokontroler.
Program ini ditulis, ketika dijalankan ia mengirimkan perintah ke IC pemandu motor sesuai dengan keperluannya untuk menjalankan motor untuk pergerakan robot seperti yang dijelaskan di atas.

Diagram Blok Kenderaan Robotik yang dikawal oleh IR
Sekiranya terdapat keraguan mengenai artikel ini, sila tinggalkan komen. Dan beritahu saya lebih banyak aplikasi dan kaedah yang berkaitan dengan ini?